(Three phase power inverter, with TMS320F28335 and IGBTs – academic work)
En el contexto de un curso de magíster, con mi compañero Waldo Monsálvez implementamos un inversor trifásico para energizar una máquina de inducción. Waldo se encargó del trabajo con Matlab y su conexión al F28335, y yo de diseñar y construir todo el hardware. La idea era implementar un control Voltaje/Frecuencia en base a un VSI (inversor fuente de voltaje), con lazo de control para el voltaje. Y lo logramos. En el siguiente video podemos ver este setup en acción.
Es importante mencionar que lo hicimos con lo que teníamos a mano… y no me quedaban disipadores térmicos para los IGBTs ni LDO’s; pero afortunadamente nuestro requerimiento de corriente en la carga es bajo (la máquina de inducción está en vacío), así que no tenemos problemas de calentamiento. Espero conseguir una placa de aluminio y aisladores para tener el setup al 100%.
¿Por qué relación voltaje/frecuencia constante en nuestro motor de inducción?
En máquina de inducción es necesario reducir la tensión de alimentación (respecto de la nominal) cuando la frecuencia de la corriente alterna aplicada es inferior a la nominal, puesto que de no hacerse así, es posible que se sature el hierro del motor, incrementando la corriente de magnetización de la máquina. Por ello, cuanto más baja sea la frecuencia de la corriente AC, menor debe ser la tensión aplicada al motor.
¿Cómo funciona nuestro inversor?
Se trata de un inversor trifásico fuente de voltaje (VSI), implementado de acuerdo al diagrama mostrado en la Fig. 1. Podemos ver el esquema de control, donde se ingresa – desde un PC externo – como referencia la frecuencia de la corriente alterna trifásica que se aplicará a la máquina. Internamente, se define el voltaje fase – fase referencia con un valor proporcional a la frecuencia ingresada (en nuestro caso, esta razón voltaje/frecuencia = 1, donde el voltaje se expresa en [V] y la frecuencia en [Hz]). A través de un operador PI (proporcional – integral) se construye un lazo de control para el voltaje.
Fig. 1 Inversor fuente de voltaje (VSI), control voltaje – frecuencia con lazo abierto de velocidad y control PI de voltaje. Créditos de esta figura a Waldo.
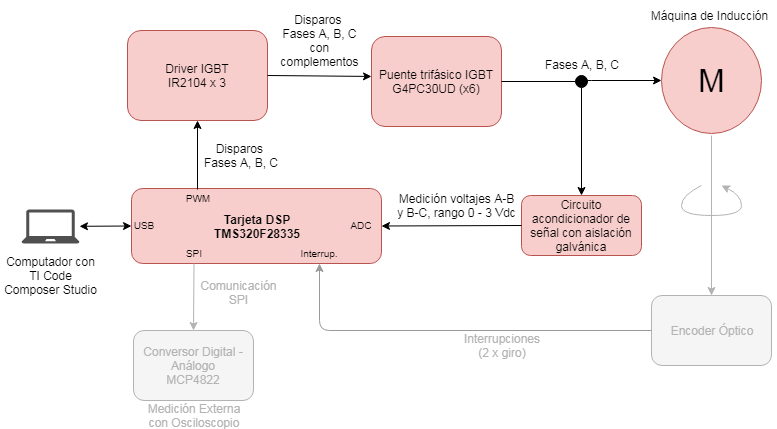
La implementación se hace de acuerdo al diagrama de bloques de la Fig. 2.
Fig. 2 Diagrama de bloques con el hardware del VSI implementado. En gris, bloques para construir a futuro.
Consta de las siguientes componentes, totalmente funcionales:
Tarjeta de desarrollo para DSP de Texas Instruments TMS320F28335. A través de interfaz USB, mantiene comunicación con un computador externo.
Puente inversor trifásico en base a IGBT IRG4PC30UD, dos por cada fase (x6).
Circuito driver basado en IR2104, uno por cada fase (x3).
Circuito acondicionador de señal, que recibe hasta 80[Vpp] conmutados a 10[kHz], y entrega a su salida una señal alterna con valor medio 1.5[Vdc] y amplitud máxima 3[Vpp]. Se basa en amplificadores operacionales TL074, cuenta con filtro pasa bajos de 1 polo a 500[Hz] y aislación galvánica a través de transformadores.
En la Fig. 2 se considera además otras unidades funcionales, las que se proponen como trabajo futuro. Estas son:
Circuito conversor Digital – Análogo (DAC) con comunicación SPI para visualización de señales internas del DSP en osciloscopio, basado en MCP4822.
Encoder óptico que entrega 2 pulsos por giro de la máquina de inducción, para medición de velocidad angular a través de señales de interrupción en DSP. Se propone utilizar el módulo KY-033 para Arduino, en forma similar a como se hizo en Taller 2.
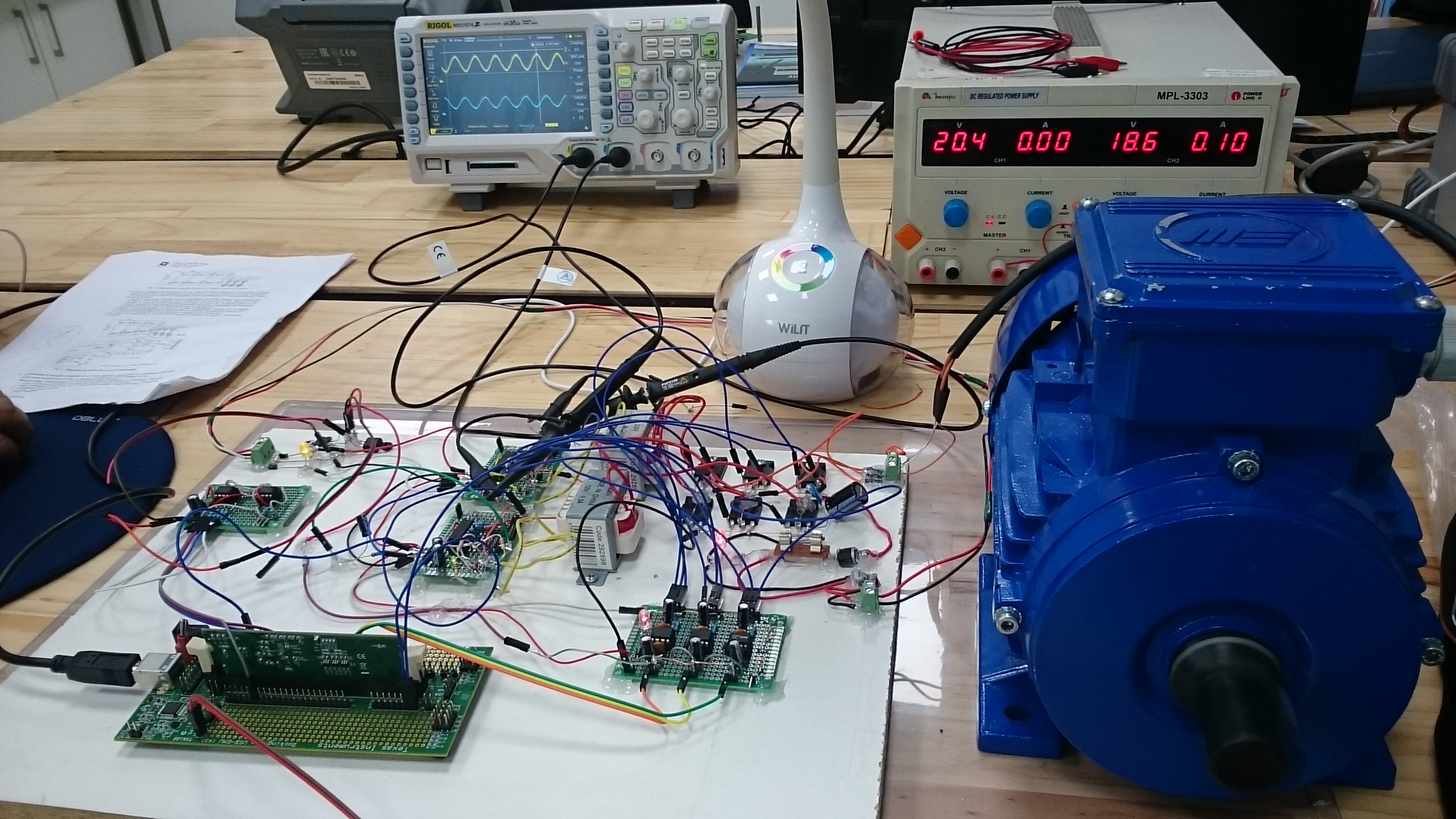
En Fig. 3 podemos ver la electrónica.
Fig. 3 Electrónica de nuestro setup, montada sobre un trozo de melamina (construcción clásica que uso desde mi época de pregrado).
A continuación una breve descripción de cada parte del hardware.
El DSP de control…
Utilizamos la plataforma de desarrollo de Texas Instruments, basada en el DSP TMS320F28335, modelo TMDSDOCK28335 (para más info, ver este link en la web de Texas Instruments).
Fig. 4 Tarjeta de desarrollo TMDSDOCK28335 de Texas Instruments.
Respecto del DSP, los pines utilizados son los siguientes:
Función
Pin tarjeta DSP
PWM Fase A
00
PWM Fase B
02
PWM Fase C
04
Voltaje A-B
A0
Voltaje B-C
A1
Tabla 1. Pines de conexión del DSP hacia etapa de potencia y medición de voltajes.
La programación se hizo con el software Code Composer Studio de Texas Instruments y Matlab, a través del cual se refrescaban parámetros que facilitaron la sintonía del control PI. Además, por esta vía se ingresaba la frecuencia de referencia. Si deseas más detalles en la forma que programamos el DSP, no dudes en escribir.
Etapa de potencia y drivers…
La etapa de potencia se basa en los IGBT´s IRG4PC30UD, y como driver para estos dispositivos ocupamos los IR2104 (uno por cada fase del inversor, dado que entrega salidas complementarias y galvánicamente aisladas, que consideran tiempos de retardo para evitar cross-conduction).
En la Fig. 5 se muestra esquemático con etapa de potencia y drivers, las que en el montaje se han dispuesto en forma separada. Esto es posible puesto que la frecuencia de conmutación PWM es bastante baja (s´olo 10kHz) por lo que no hay inconvenientes con inductancias y capacitancias par´asitas del circuito.
De acuerdo a indicaciones del fabricante de los IR2104, la tensión DC máxima del bus de potencia es +600 Vdc. En nuestro caso, por seguridad y dado que se adapta a las tolerancias de tensión de nuestro circuito de acondicionamiento de señal y entrada del ADC, trabajaremos sólo con +40Vdc.
Fig. 5 Drivers y etapa de potencia.
Y el acondicionador de señales para los ADC (muestra de voltajes fase-fase)…
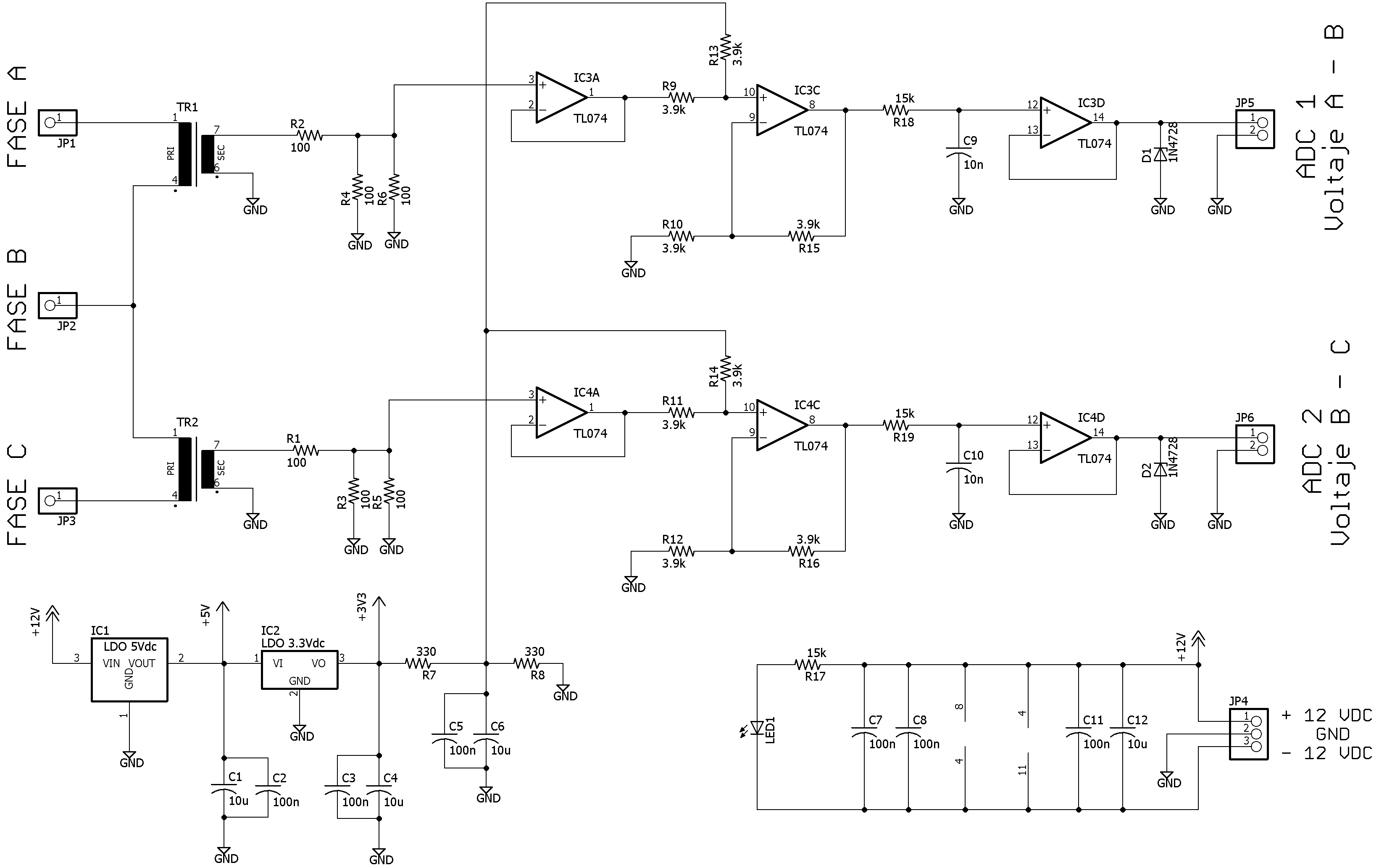
En la Fig. 6 se muestra el circuito de acondicionamiento de señal, que permite adaptar la tensión alterna y conmutada de los voltajes fase – fase vab y vbc, con valor medio 0, a la entrada de conversores análogo – digital del DSP, cuyo rango de operación es 0 a 3 V. Para ello, el circuito de la Fig. 3 realiza las siguientes operaciones:
A través de transformadores cuya relación de transformación es 220/12 Vac, se obtiene aislación galvánica entre la tensión trifásica de salida y la etapa de medición, se reduce la tensión por un factor 1/18; y también se filtra parcialmente la componente de alta frecuencia de salida (10kHz y armónicas de esta frecuencia).
Se reduce la tensión en 1/3, a través de un divisor de tensión resistivo.
A través de amplificadores operacionales y una red RC, cuyo polo se ubica a una frecuencia de 1kHz, se filtra la componente de alta frecuencia (10kHz y sus armónicas). La salida del circuito acondicionador de señal es de baja impedancia.
El circuito con amplificadores operacionales también suma la tensión de 1.61Vdc (medido, idealmente 1.5Vdc) a la tensión alterna de salida, permitiendo que semiciclos positivos y negativos estén dentro del rango de tolerancia del ADC. El valor medio utilizado fue 1.61V – medido en el divisor de tensión formado por R7 y R8 – (este valor se usa para calibrar el software).
Finalmente, un diodo Zener 1N4728 elimina sobretensiones que pudieran dañar las entradas analógicas del DSP.
Fig. 6 Circuito acondicionador de señal. Recibe voltajes Fase-Fase 80Vpp, y a la salida 0 a 3V, con 1.61V valor medio. Filtra componentes de alta frecuencia PWM (10 kHz y armónicas).
Y para cerrar este artículo de mi blog, una vista general del setup. Hay mucho más trabajo del que se ve a simple vista – especialmente en el lazo de realimentación de voltaje -, pero espero que con este artículo se les haga más fácil a quienes necesiten implementarlo a futuro.
Fig. 7 Setup implementado con nuestro inversor trifásico.
Mis agradecimientos a Duberney Murillo (LARI) por sus valiosos consejos y por facilitarnos un espacio de trabajo.
(Academic work – buck converter with DSP F28335 Texas Instruments)
En el contexto de un magíster en ciencias que estoy cursando actualmente, junto a mi compañero de clase Waldo M. tuvimos de desarrollar el trabajo que muestro a continuación. Es la primera actividad de un curso que contempla una serie de experiencias de laboratorio en el ámbito de la electrónica de potencia.
Introducción
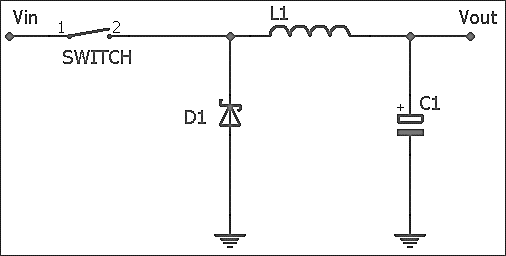
Se conoce por Convertidor Buck (o convertidor reductor, o step-down) no aislado al circuito cuya topología es la mostrada en la figura 1, donde el conmutador representa un dispositivo semiconductor de alta velocidad como MOSFET o IGBT, operando en modo apagado (o abierto, es decir, en alta impedancia) y encendido (o cerrado, saturado, es decir, a resistencia mínima) según una señal de encendido proporcionada por un dispositivo controlado digitalmente (como un microcontrolador, DSP o computadora) o analógico (por ejemplo, el circuito integrado TL494, ampliamente utilizado en fuentes de poder conmutadas de bajo costo).
Figura 1. Topología básica del convertidor buck (o step down, reductor de tensión) no aislado.
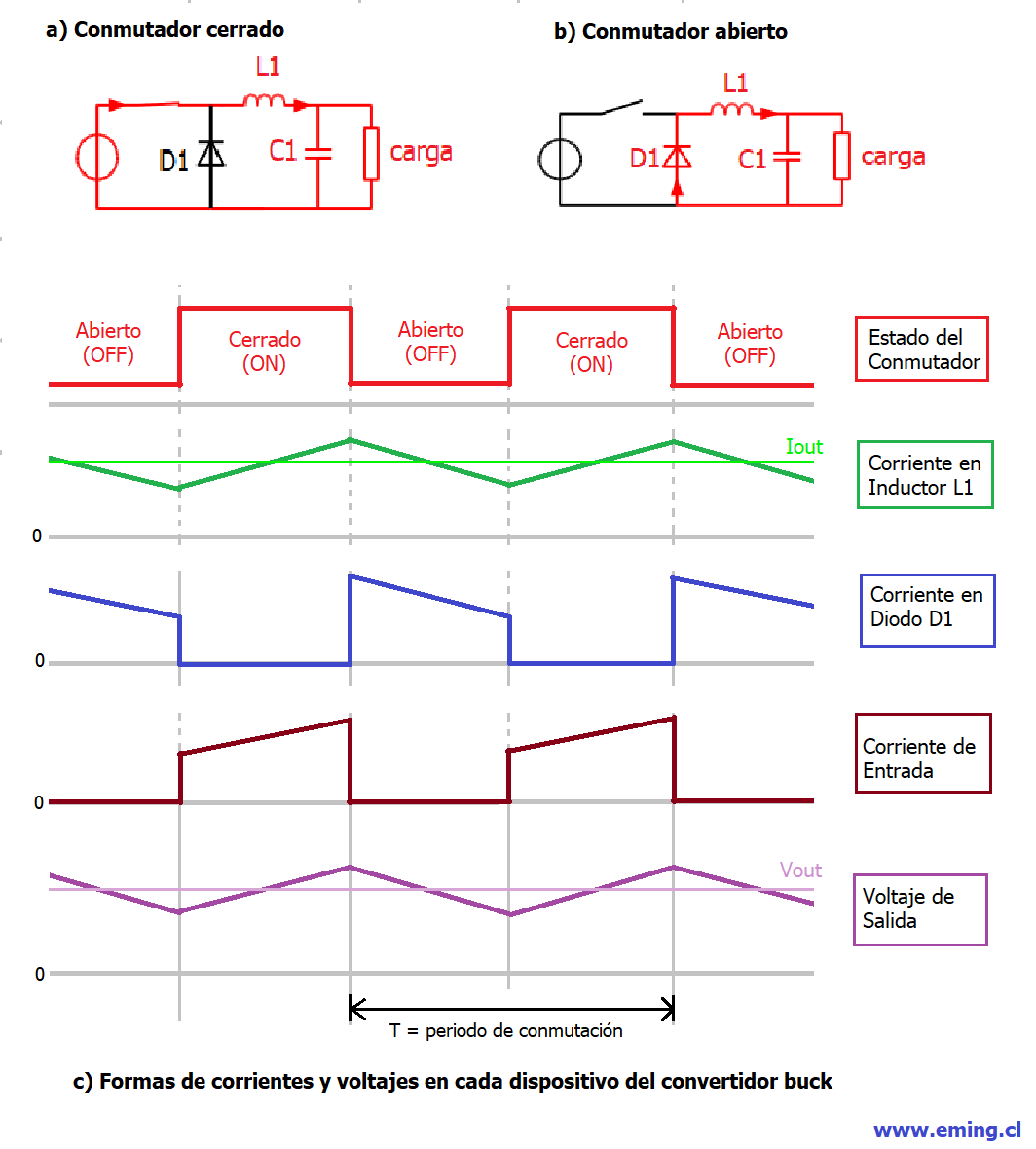
En síntesis, el convertidor buck opera a través de ciclos repetitivos de carga y descarga del inductor L1 y capacitor C1, mostrados en la figura 1. En régimen permanente, cuando el conmutador (switch) está cerrado, la tensión de entrada Vin produce un incremento en la magnitud de la corriente circulante por L1, la que continúa circulando cuando el conmutador se abre gracias al diodo D1. El capacitor C1 reduce el rizado generado por la conmutación en la inyección de corriente al inductor. En la figura 2 se aprecia el funcionamiento básico recién descrito y formas de corrientes y voltajes en componentes del circuito.
Figura 2. Operación básica del convertidor buck y formas de corrientes y voltajes en componentes del sistema, considerando modo continuo de operación.
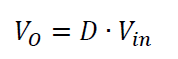
Dependiendo de la corriente circulante por la carga, voltaje de salida, frecuencia de conmutación e inductancia de la bobina L1, podemos diferenciar la operación de convertidor Buck como modo continuo (cuando la corriente por L1 > 0 para todo t) y modo discontinuo (si en parte del ciclo de trabajo la corriente por el inductor se hace nula). Las ecuaciones que relacionan voltaje de salida y ciclo de trabajo son muy diferentes, y se muestran a continuación:
Ecuación 1. Relación de voltajes para operación en modo continuo.
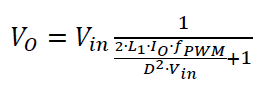
Ecuación 2. Relación de voltajes para operación en modo discontinuo.
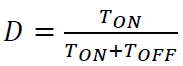
Donde:
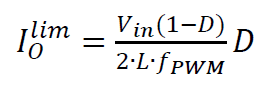
es el ciclo de trabajo del conmutador PWM, fPWMes la frecuencia de conmutación [Hz]. La ecuación (2), que define la tensión de salida para modo discontinuo, es válida cuando la corriente de carga es menor al valor definido por:
Ecuación 3. Corriente de carga límite entre modo continuo y discontinuo.
El convertidor buck operará en modo continuo si la corriente de salida es superior al valor límite dado por la ecuación (3), relación que se cumplirá en todos nuestros análisis posteriores. Basta con verificar (por ley de Ohm) corriente de carga según RCARGA y tensión de salida VOUT.
Diseño
Se decide utilizar la frecuencia PWM fPWM = 5 [kHz], definida en base a experiencia práctica en el uso del optoacoplador 4N32 (única unidad disponible al momento de realizar la experiencia). Esta es la máxima frecuencia a la cual se han obtenido resultados experimentales satisfactorios, pues el tiempo de apagado del transistor Darlington de salida de este dispositivo se hace significativo para frecuencias superiores.
Se dispone del núcleo toroidal de ferrita B64290L22X830, hecho de material N30, con AL = 5000±25% [nH], adecuado para operar hasta una frecuencia de conmutación de 400 [kHz] (a frecuencias superiores, el núcleo toroidal se calienta y con ello disipa potencia, arriesgando la modificación de sus características ferromagnéticas en forma permanente). Además, se cuenta con un condensador electrolítico de 100[uF]/100VDC (notar la elevada tensión de ruptura de dieléctrico, pensado en soportar eventuales transitorios e incrementar vida útil, en desmedro de mayor costo y volumen). Un valor muy elevado del inductor reducirá el rizado en la onda de corriente, pero a la vez incrementará las inercias del sistema, haciendo más lenta la respuesta ante cambios en la referencia y transitorios más pronunciados y duraderos. Por otro lado, un valor muy reducido incrementará el rizado y, en caso extremo, puede elevar la corriente en el dispositivo de conmutación en forma excesiva durante tON cuando la tensión en la carga es pequeña (por ejemplo, cuando el capacitor está descargado al inicio de operación del dispositivo). Es importante tener presente que mayores valores de inductancia se traducen en mayor volumen de esta y costo, por lo que conviene incrementar la frecuencia de conmutación y así reducir las constantes de tiempo asociadas a L y C. Sin embargo, al incrementar la frecuencia también aumentan las pérdidas de potencia en el núcleo del inductor, pérdidas por efecto pelicular en conductores y en capacitancias internas de semiconductores. Considerando como criterio de diseño un rizado r máximo del 2% de la corriente promedio en inductor para una frecuencia de conmutación fPWM = 5 [kHz], tenemos que:
y como AL = L/N^2, con N =número de espiras en inductor, tenemos que se requiere N » 77 espiras. En laboratorio se dispone de inductor construido con este núcleo toroidal, con una inductancia de 36 [mH] (medidos a 1 [kHz]). Por otro lado, cálculos preliminares estiman que, para este toroide y número de espiras, la corriente de saturación del inductor será del orden de 5 [A], por lo cual si se supera dicho valor se reduce el valor de L, alterando los parámetros de diseño del convertidor. Se procurará no superar dicha corriente máxima.
En la fórmula recién señalada se ha despreciado la caída de tensión en diodo y MOSFET, así como el valor normalizado del rizado en la tensión del condensador respecto de su valor promedio. Esto es razonable, dado que la reactancia capacitiva de nuestro condensador de 100 [uF]/100VDC para la frecuencia fundamental es mucho menor que la reactancia inductiva del inductor:
Para las frecuencias armónicas, esta desigualdad continúa creciendo. Se hace conveniente el uso de condensadores adecuados para rizado (por ejemplo, de mica) de alta frecuencia en paralelo al condensador electrolítico de alta capacidad, ubicados convenientemente en circuito impreso para incrementar vida últil del capacitor electrolítico (siendo este el que más suele deteriorarse a medida que avanza el tiempo).
El diodo seleccionado para esta fuente es el MUR840, especial para conmutaciones de alta velocidad. Es capaz de soportar corriente promedio de 8 [A], más que suficiente para nuestro propósito.
Simulación
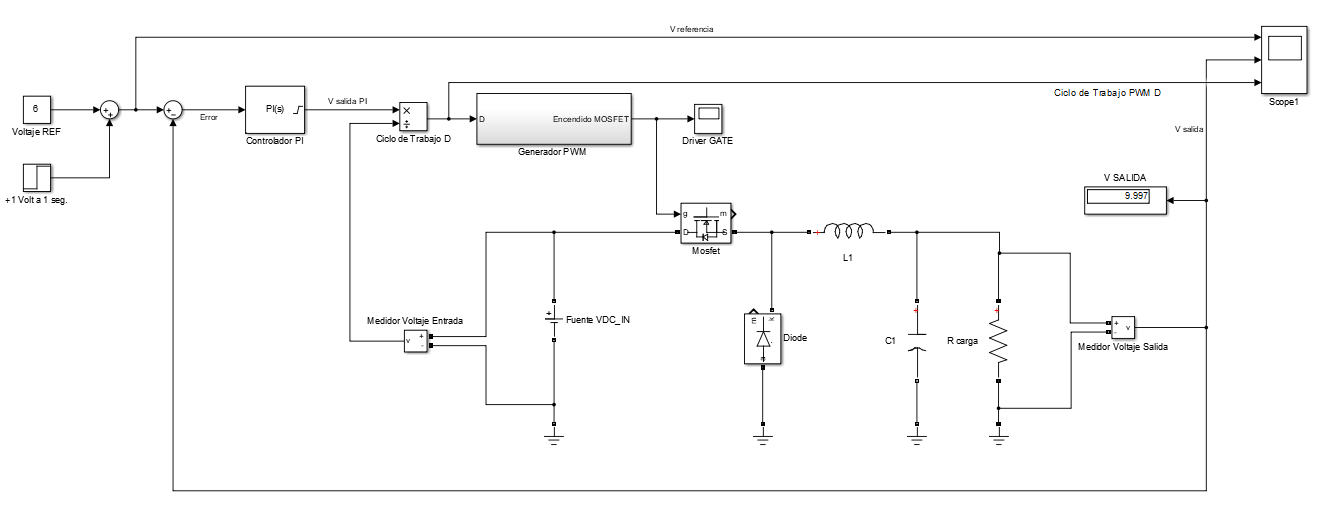
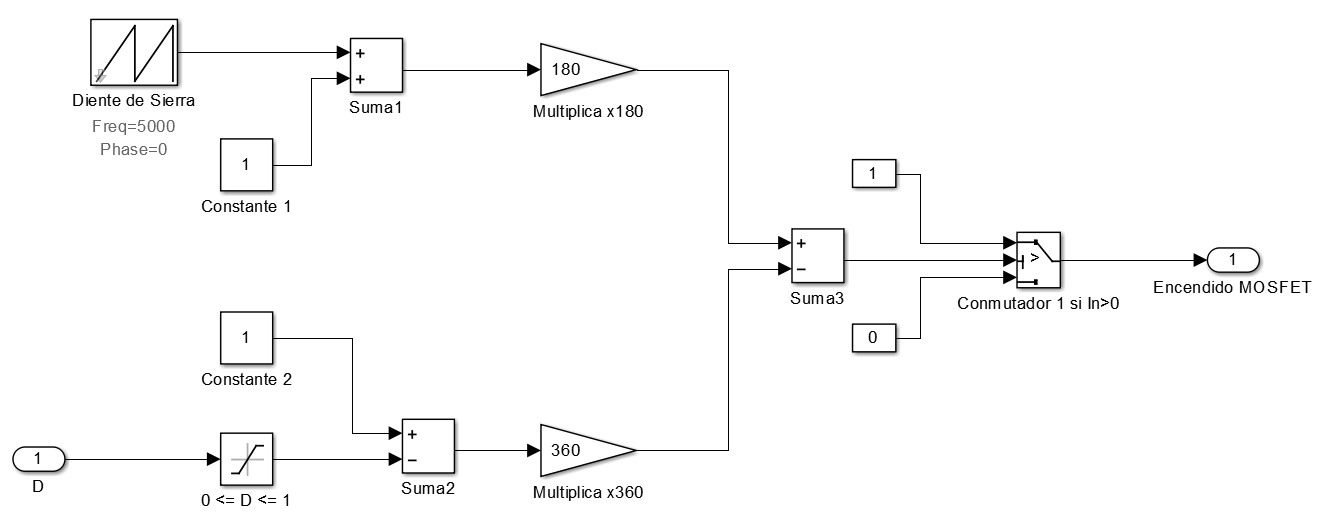
Se desarrolla en el software Matlab Simulink, de acuerdo a los diagramas mostrados a continuación para el convertidor (figura 3) y generador PWM (figura 4).
Figura 3. Esquema simulado en MATLAB Simulink del convertidor Buck. Los parámetros son L1= 36 [uH] C1= 100 [uF], RCARGA = 10 [Ohmios] y fpwm= 5 [kHz].Figura 4. Esquema de circuito de disparo, simulado en MATLAB Simulink.
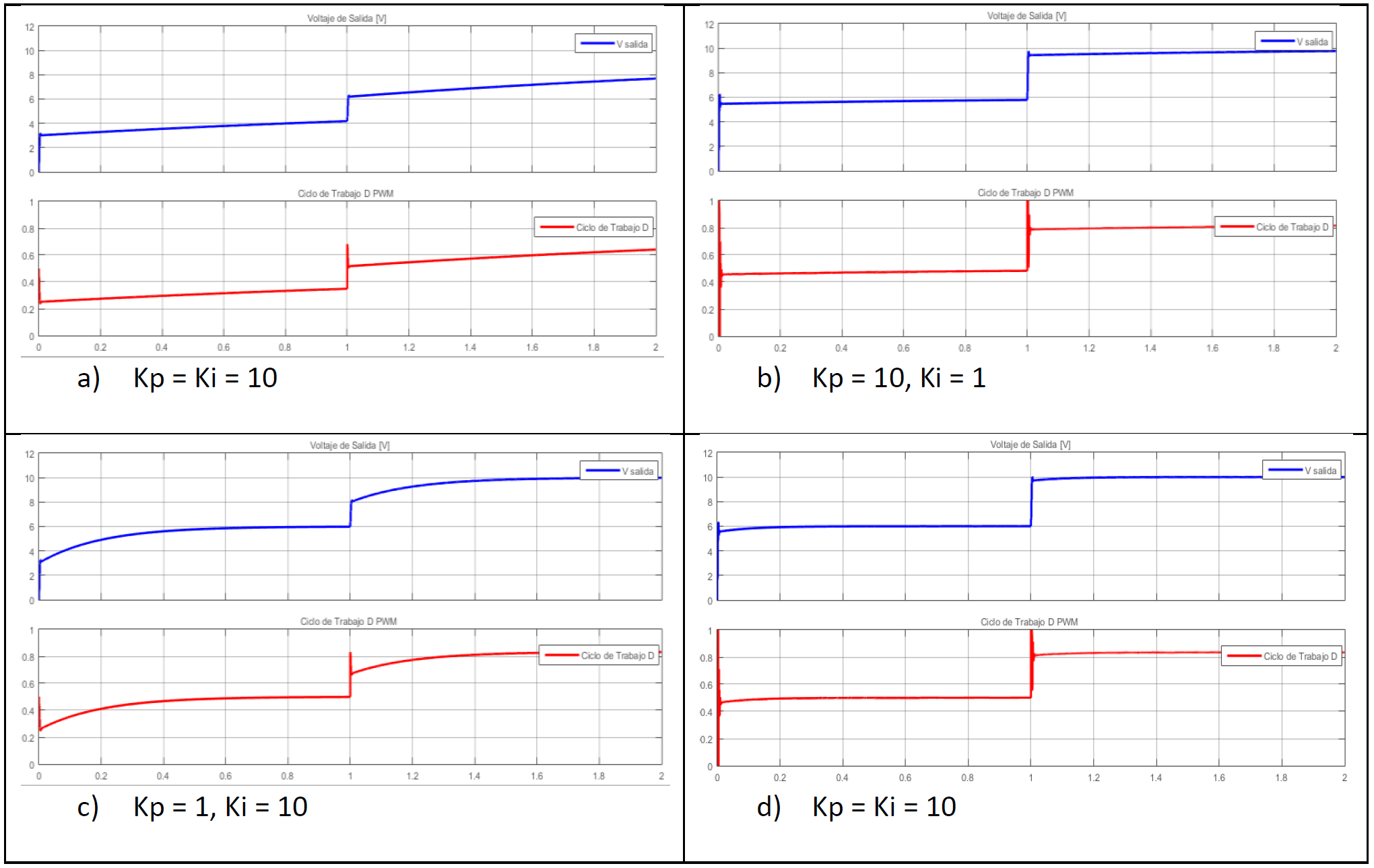
Ensayando diferentes parámetros de ganancia para el controlador PI se observa que un incremento en la constante de control proporcional Kp reduce el tiempo que tarda la salida en aproximarse al valor de referencia, pero no elimina el error de estado estacionario (diferencia entre voltaje de referencia y salida del convertidor cuando t tiende a infinito) y puede generar sobrepasos importantes (sobretensiones, lo que puede generar daños en la carga). Por otro lado, incrementos en la constante de integración Ki permite reducir a cero el error de estado estacionario, pero puede empeorar la respuesta transitoria del convertidor (se hace más lenta). Para ver comparativa ante diferentes valores de Kp y Ki, ver figura 5. También es importante mencionar que ganancias excesivas en el lazo de control puede conllevar problemas operativos a la unidad, dada la amplificación de errores de medición y la alta exigencia a los actuadores (saturación del parámetro de control D, lo que es especialmente relevante por el comportamiento inestable del convertidor cuando D se aproxima a sus límites teóricos, siendo recomendable su operación con valores entre 0.2 y 0.8).
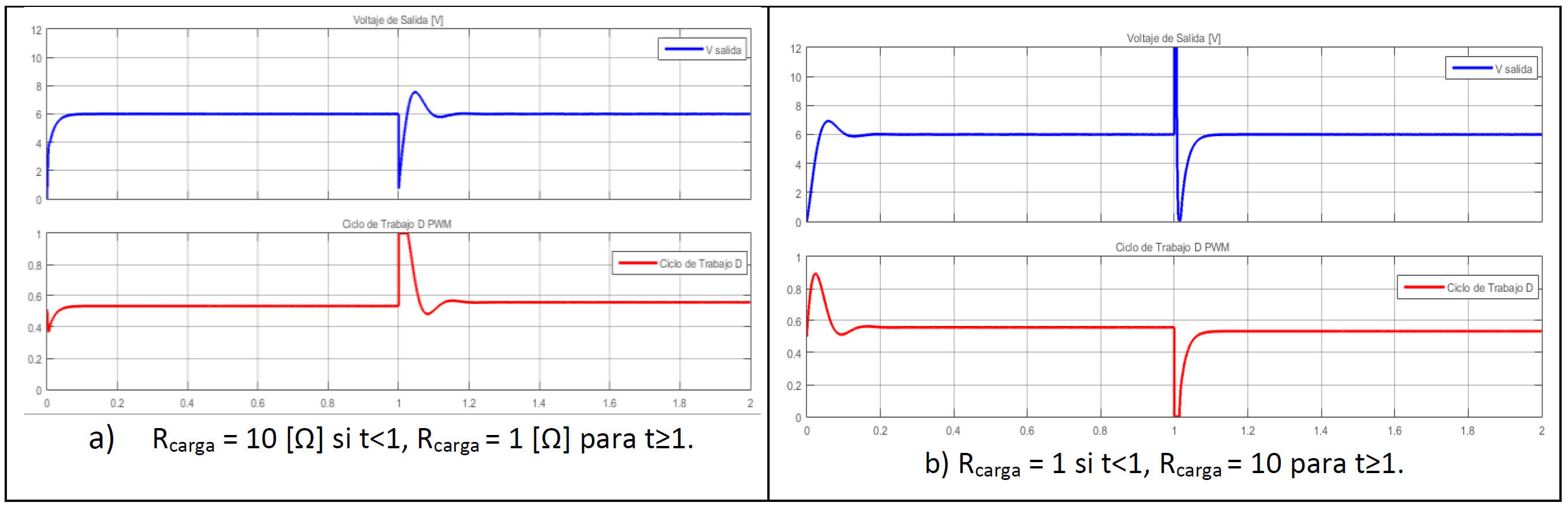
Figura 5. Respuesta del convertidor controlado ante variación en la tensión de referencia. Vref = 6 [V] para t<1 [s], y Vref = 10 [V] para t≥1 [s].Figura 6. Respuesta del convertidor controlado por PI con Kp = Ki = 10. Vref = 6 [V].
En la figura 6 se muestra la respuesta del sistema, considerando un control PI con Ki = Kp = 10. Se ha variado en forma importante la resistencia de carga (como podría ser el torque mecánico aplicado al eje del motor DC), en (a) con un aumento de la corriente de carga (rotor haciendo más esfuerzo mecánico), mientras que en (b) con una reducción de este. Notar que teóricamente el lazo logra controlar la tensión de salida. Este ejercicio está pesado sólo a modo de ejemplo, pues el efecto se hace mas visible en estas magnitudes para la carga. Sin embargo, para evitar exigencias sobre las componentes semiconductoras y el toroide, las corrientes en régimen permanente de carga se trabajarán por debajo de los 3 [A].
Implementación
Para la generación del PWM e implementación del controlador PI para el voltaje de salida se utiliza la tarjeta de desarrollo TMDSDOCK28335, basada en DSP de Texas Instrument TMS320F28335. Su configuración se realiza a través de interfaz USB – JTAG, utilizando Matlab Simulink y el software especializado TI Code Composer Studio.
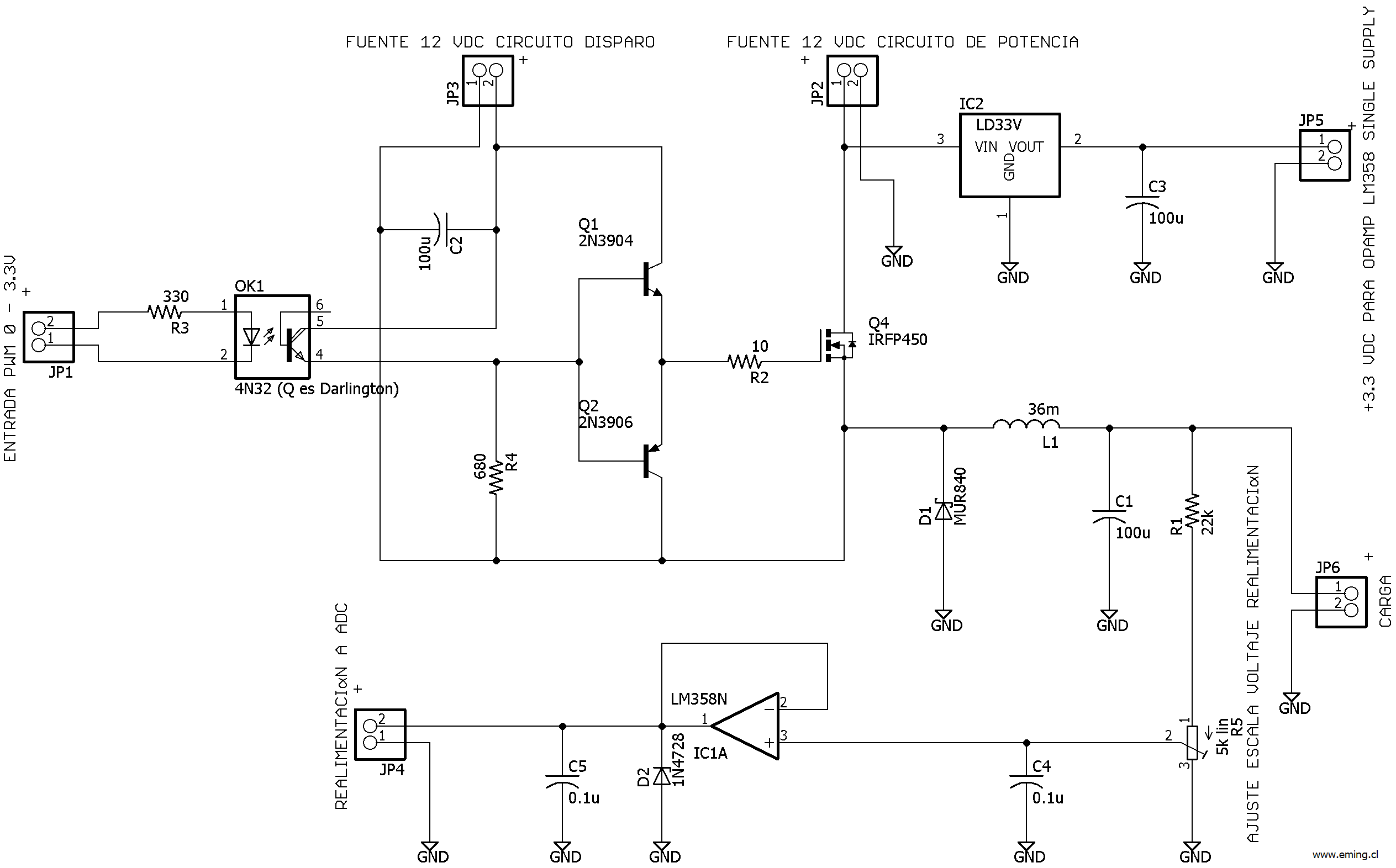
El circuito implementado es el mostrado en la figura 7.
Figura 7. Esquemático del circuito implementado.
La implementación requirió el uso de 2 fuentes de poder DC flotantes entre sí. La primera para alimentar la etapa de potencia (esquema mostrado en la figura 1) y lazo de realimentación; y la segunda exclusivamente para el circuito de disparo del MOSFET IRFP450. La aislación galvánica entre el circuito de disparo es necesaria pues la fuente (Source) del MOSFET se encuentra a un voltaje variable, distinto de la referencia GND, y el voltaje de encendido del MOSFET debe ser aplicado entre compuerta y fuente del MOSFET. La tensión de esta fuente está dada por la requerida por el MOSFET entre compuerta GATE y fuente SOURCE para operar en modo saturado, en nuestro caso de 10 [V] típico. Esta no debe superar los 20 [V], para así no dañar la aislación existente entre compuerta y fuente del MOSFET (muy sensible a sobretensiones). A través de simulación, se ha comprobado que ningún componente está operando por encima de sus valores máximos, por lo que no se esperaba (ni hubo) dispositivos dañados.
En el lazo de realimentación se ha considerado una resistencia variable R5 (potenciómetro) para el ajuste del divisor de tensión (formado por R1 y R5) que permite adecuar los niveles de tensión a los que soporta la entrada ADC del DSP (0 a 3.3 V), el que se hace proporcional al voltaje de salida del convertidor. El amplificador operacional LM358N puede operar desde los 3 VDC con alimentación simple (referida a GND, no diferencial), y en nuestro caso tiene la función de mostrar una alta impedancia hacia el divisor de tensión (y así no modificar la tensión observada entre R1 y R5, mejorando la estabilidad de las mediciones), y una baja impedancia hacia la salida, donde se conecta el ADC. Además, al alimentarse con +3.3 VDC, permite limitar el rango de tensión que llega al ADC, proporcionando protección a este input del DSP. Los capacitores C4 y C5 están para eliminar componentes de ruido en alta frecuencia presentes en el lazo de realimentación, mientras que el diodo zener D2 tiene la misión de proteger la entrada del ADC ante sobretensiones y estática.
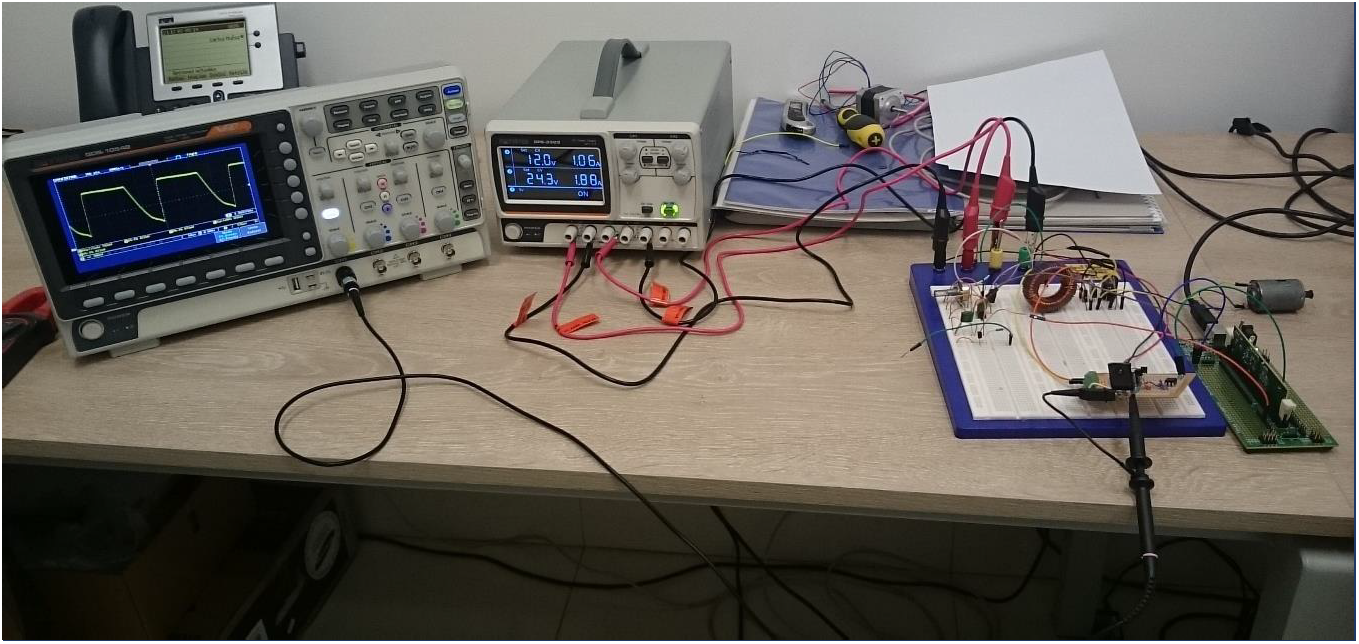
Fotografía 1. Setup implementado.
Fue necesario reducir el valor de R4 a 330 [Ohmios], puesto que el apagado del transistor Darlington de salida del optoacopador era muy lento con resistencias más elevadas. La corriente circulante se incrementa por el circuito de disparo (del orden de 50 [mA]), pero funciona en forma estable y sin calentarse.
Luego de jugar con los valores de Kp y Ki, y ajustar la lectura del ADC de realimentación a través del potenciómetro R5, se obtuvo como resultado un convertidor buck muy estable, con precisión del orden de 0.1 [V] . Variando los valores de carga verificamos que el controlador PI anda bastante bien, y que para cargas más grandes (en nuestro caso, superiores a 1 [A]) el rizado hacía que el inductor emitieria ruido audible de 5 [kHz], nuestra frecuencia de conmutación. El rango de operación satisfactoria del convertidor que obtuvimos es de aproximadamente 3 a 10 [VDC], con 12 [VDC] como entrada.
Para más información respecto de este proyecto, puedes solicitarla a través del formulario de contacto o por correo. Saludos y buen fin de semana.
(Chaski RF… the messenger of the Andes. Portable and autonomous radio & data repeater station. Part I)
Nace la idea de Chaski RF en el norte de Chile… para Latinoamérica y el Mundo.
Esta historia la hemos compartido muchas veces en conversaciones y charlas, y aquí la voy a contar desde el principio, incorporando algunos datos de interés técnico…
Foto 1. Salar de Tara. Lugar donde nace la idea de nuestra estación portátil. Aquí mismo la bautizamos como Chaski – en honor a los antiguos mensajeros del imperio inca (ver info en Wikipedia sobre los Chaskis o Chasquis) -.
Todo empezó en nuestras vacaciones al Norte Grande de Chile, en mayo del año 2013. Pao y yo estuvimos 10 días recorriendo San Pedro de Atacama y sus alrededores, tomando casi todos los viajes turísticos que se ofertan en el lugar. Entre ellos, un recorrido por el Salar de Uyuni – Bolivia, y el ascenso al Salar de Tara (muy cerca del límite tripartito entre Argentina, Bolivia y Chile). Fue en este lugar donde, estando totalmente incomunicados, en plena Cordillera de los Andes y por sobre los 4.000 metros sobre el nivel de mar, tuvimos una emergencia. De casualidad, encontramos una familia completa de turistas franceses – con bebé incluído -que en pleno recorrido por el altiplano, tuvieron problemas para mover su vehículo. Quedaron atrapados en uno de los lugares mas inhóspitos del planeta. La mamá de esa familia (que apenas decía unas pocas palabras en español), salió sola a buscar ayuda por el desierto. Caminó por lo menos unos 20 kilómetros en pleno altiplano, tratando de llegar a la ruta por la que suben los turistas (ruta indefinida… nada más que huellas marcadas en el árido suelo), y sólo con una botella de agua en las manos. Encontrarnos fue como dar con una aguja en un pajar, ante tanta inmensidad del paisaje y la soledad casi absoluta que reina las alturas. Más aún a esa hora, cuando ya se acercaba la noche y nos disponíamos a regresar a San Pedro de Atacama. Dado que no tenían teléfono satelital (el único medio de comunicación portátil que funciona en ese lugar), de no encontrarlos hubiesen permanecido allí durante la noche, cuando las temperatura desciende a decenas de grados bajo cero. Hubiera sido muy compleja la situación para ellos, en especial para los más pequeños, pero gracias a la Pachamama nos encontramos y la historia tuvo final feliz.
Esto motivó a que indagáramos sobre cómo resuelven sus necesidades en comunicaciones las empresas turísticas que operan en la zona – convengamos que es San Pedro de Atacama, uno de los lugares más visitados de nuestro país -. Nos encontramos con la sorpresa que, a esa fecha – año 2013-, la mayoría de las empresas no contaba con teléfonos satelitales (por costo), ni hablar de los celulares (sólo tienen servicio en zonas donde es negocio para las compañías telefónicas, por lo que descartamos áreas no pobladas ni con rutas vehiculares importantes), menos aún de comunicaciones NVIS (que tampoco es barato y su operación en estaciones móviles es compleja) y las radios VHF/UHF que traían en los vehículos no tienen cobertura entre los cerros (por falta de estaciones repetidoras). Había una necesidad de comunicaciones no cubierta.
Ante esta necesidad pensamos en construir un kit repetidor de bajo costo, al que inmediatamente bautizamos como Chaski. ¿Por qué Chaski? bueno… una reflexión habitual cuando mirábamos la inmensidad del paisaje andino era: «quizás qué bellos paisajes vieron los antiguos chasquis en su recorrido por el altiplano… cuántas hazañas por llevar información a cada rincón del reino inca». Fue inevitable imaginar una solución tecnológica hecha en Latinoamérica, capaz de cumplir esta noble labor de comunicar en estos lugares tan extremos. Crear una solución como esta sería un humilde homenaje a estos admirables hombres del mundo precolombino.
Tuvimos que incorporar «RF» (de RadioFrecuencia) para distinguirlo del concepto base en quechua, pudiendo registrarlo en INAPI. Así quedó como Chaski RF.
Logo CHASKI RF, marca registrada.
Pero… ¿qué es una estación repetidora de radio?
Es un conjunto de equipos y materiales que permiten extender el área de servicio (alcance) de los sistemas de radiocomunicaciones. Habitualmente se instalan en lo alto de cerros y montañas, o bien a nivel de las ciudades pero con grandes torres para soportar antenas, esto con el objetivo de incrementar el área de cobertura (servicio) del sistema de radiocomunicaciones.
He tenido la oportunidad de conocer diferentes estaciones repetidoras, varias de ellas instaladas en cerros bien conocidos por su buena visual hacia los valles poblados con grandes ciudades, donde existen caminos para acceso en camioneta 4×4 y hay disponible energía eléctrica (típicamente línea bifásica de media tensión). Sin embargo, cuando hablamos de sectores rurales, donde las grandes ciudades están muy lejanas, lo más común es que no haya camino vehicular hacia los cerros y tampoco de disponga de energía eléctrica en ellos. Además, estos sitios usualmente contienen ecosistemas sensibles a la intervención humana, y cada obra de ingeniería debe ser rigurosamente evaluada antes de implementarse.
Foto 2. Sitio repetidor analógico básico en cerro Macón, por sobre los 5.000 m.s.n.m. en el Valle de Chajnantor – Región de Antofagasta, Chile. Tomé esta foto en mi visita al Interferómetro Radioastronómico ALMA el año 2010, precisamente trabajando en una propuesta para un nuevo sistema de radiocomunicaciones, reemplazo del utilizado en la etapa de construcción del interferómetro.
Esto hace muy compleja la instalación en terreno de las estaciones repetidoras, siendo necesario muchas veces el uso de helicópteros para el transporte de personas, equipos y materiales; e incluso la implementación de instalación de faena (lo que aumenta el impacto ambiental y costos). Por ello, nos pareció interesante desarrollar una solución en repetidoras de radio de fácil instalación (sin obras civiles ni uso de maquinaria pesada) y autónomas energéticamente.
Primeras versiones de Chaski RF
La idea era armar una estación repetidora que en terreno fuera tan simple de instalar como una carpa para acampar. Partimos por lo más simple… nada más que un back to back entre radios portátiles. Una para up-link y otra para down-link. Solución natural al estilo del radioaficionado que soy, y de bajo costo. Lo pusimos en una caja provista de energía y anduvo bien, pero no tanto como queríamos. Faltaban funcionalidades y había detalles por mejorar en su tarea básica como repetidor de radio.
Foto 3. Primeras pruebas prototipo Chaski
Con recursos 100% propios, trabajamos en nueva electrónica. Logramos avances importantes, pero seguíamos con la sensación que podíamos mejorar la solución. Por falta de insumos, se hacía difícil seguir adelante con el proyecto.
Foto 4. Un pequeño pájaro posa sobre nuestro primer prototipo de estación Chaski RF.
Con nuestro Chaski RF básico, hicimos pruebas operacionales en la Laguna del Maule (en adelante, nuestro laboratorio natural para cada versión de Chaski RF). Poco a poco íbamos corrigiendo los detalles técnicos de la solución para radiocomunicaciones que tuvimos en un principio. La caja estaba quedando chica y necesitábamos más energía. Había que seguir avanzando.
Trabajo con Corfo y la Incubadora de Negocios de la Universidad de Concepción.
Armados con la idea básica de negocio y el prototipo simple de Chaski RF recién descrito, nos acercamos al Centro de Desarrollo de Negocios de Talca. La idea era buscar ayuda para convertir nuestro trabajo en una solución atractiva para clientes locales y también para inversionistas ad-hoc (buscamos «smart money»!!). Aconsejados por nuestro ejecutivo estrella, el ingeniero comercial y magíster en finanzas, Mario Rojas Bastías, decidimos postular a fondos Corfo (ver link sobre Corfo). Había que preparar un proyecto (buena oportunidad para aprender conceptos de negocios) y un video pitch en el cual contar nuestra idea en sólo 1 minuto.
Foto 5. Grabaciones pitch de Chaski para postular a fondos Corfo. Gran trabajo David, Vicente y Javi, y por supuesto Pao. Ella fue la artífice del guión casi en su totalidad
Con el guión de Pao, y el buen trabajo de David, Vicente y Javi sacamos el primer video relativo a Chaski. Fue nuestro pitch – hecho en tiempo record – para postular a fondos CORFO. Nuestro objetivo era conseguir co-financiamiento para desarrollar un Producto Mínimo Viable (PMV), hacer difusión y prospección comercial. A continuación, como quedó el video pitch de Chaski:
Video 1. Pitch para postular a fondos Corfo. Quedó filete! salvo pequeños errores en las gráficas. Excelente trabajo muchach@s.
Luego de un riguroso proceso de selección y una presentación estilo «Shark Tank», fuimos uno de los proyectos beneficiados por CORFO el año 2016. Con Pao, Mario y todos quienes nos apoyaron, fuimos a tomar unos vinos bien merecidos.
Durante un año completo trabajamos con el apoyo de CORFO, patrocinados por la Incubadora de Negocios de la Universidad de Concepción (Incuba UdeC). En este tiempo desarrollamos el Producto Mínimo Viable (PMV), hicimos prospección comercial y difusión de nuestra solución. Ganamos la oportunidad de presentar nuestra idea de negocio a inversionistas privados, en el contexto del Programa Alas Bio-Bío. Aunque nos fue esquivo el «match», y no encontramos el «smart money» que buscábamos, gracias al Alas Bio-Bio conocimos un poco sobre la realidad del empresariado nacional – al menos el perfil de las personas que allí participaron -. También estuvimos en ferias tecnológicas, como la Feria de Innovación y Emprendimiento de Talca (FINEM), Creo en Chile y Expo Andes (Santiago). Fue un año muy ajetreado.
Foto 6. Junto a mi compañera de aventuras Pao, con nuestro Chaski RF en la feria Creo en Chile. Santiago, junio 2017. Aquí estaba la electrónica un poco más avanzada, pero aún no teníamos el up-grade en la carcasa.
Fotos 7. Aquí estamos en la Feria de la Innovación y Emprendimiento del Maule (FINEM) junto al equipo CORFO, entre ellos (el gran) Tadashi Takaoka, entonces gerente de emprendimiento. También están Juan Eduardo y Sole (de Crescat).
Fotos 8. También en FINEM, donde aparecemos junto el team de diseñadores industriales encargados del diseño y construcción exterior de Chaski RF. Notar que tenemos una nueva presentación, pero que posteriormente fue modificada luego de algunos fallos en terreno.
Lo bueno… conocimos mucha gente buena. Gente colaborativa que cree en el valor del emprendimiento tecnológico y los beneficios que tiene para nuestra sociedad, más allá de la simple visión de negocio. Lo malo y nuestro error, subestimamos los costos y quedamos medio trasquilados.
Evolución de Chaski RF
Cuando iniciamos nuestro trabajo con CORFO, Chaski RF estaba basado en el clásico back-to-back de radios portátiles, con una pequeña electrónica de control. Gracias al co-financiamiento pudimos construir varias tarjetas electrónicas que desde hacía tiempo queríamos probar. Esas ideas – que estaban sólo como un diseño en el computador – se conviertieron en circuitos electrónicos reales. Así, después de bastante ensayo – error, logramos un buen up-grade de nuestra solución.
Foto 8. Yo en el laboratorio. Está más ordenado de lo habitual (íbamos a tomar esta foto para ponerla en un informe para CORFO… jejeje). Las ojeras salen luego de pasar muchas horas ruteando tarjetas electrónicas o programando.
Gracias al desarrollo de nueva electrónica para nuestro Chaski RF, pudimos incorporar nuevas funcionalidades:
Control inteligente de uso de energía, permitiendo que la estación tomara medidas para reducir el consumo de energía. Muy útil si no hay suficiente disponibilidad de energía fotovoltaica como para operación continua, o bien cuando hay alto tráfico de llamadas.
Sistema de alarma anti-robos. Detector de vibraciones y movimiento que alarma localmente (tono de advertencia) y remotamente (avisa a los usuarios de la estación) sobre intentos de robo. Se implementó inteligencia para operar correctamente en caso de movimientos telúricos (control de falsa alarma).
Nodo LoRa. La gran cantidad de personas y empresas que conocimos con la necesidad de transmitir datos de telemetría [de hacer Internet de las Cosas (IoT)], nos motivó a incorporar un módulo LoRa a Chaski RF. Así, podremos extender el área de servicio de las redes que permiten transmitir los datos desde sensores remotos hacia servidores, y también desde estos hacia actuadores. Por ejemplo, podemos comunicar estaciones meteorológicas, letreros LED de caminos, entre otras cosas.
Una de las características interesantes -a mi gusto-, y que responde más a un deseo personal que a resolver una necesidad práctica, es la funcionalidad de «Beacon» (baliza) que posee Chaski RF. No me refiero a la clásica baliza de luz intermitente (cosa que también tiene, y que según sea la aplicación puede ser conveniente configurar para que se active automáticamente durante la noche), sino que a un beacon en RF. Gracias a esta funcionalidad, podemos configurar el equipo para que cada cierto lapso de tiempo (sin tráfico) configurable (5 minutos, 15 minutos, 30 minutos, 1 hora o 12 horas), emita un mensaje de voz pregrabado en un archivo digital y/o una secuencia de caracteres en MCW (CW modulado – tono codificado en morse, muy típico en comunicaciones de radioaficionados, el cual puede contener información operacional de equipo como temperatura, nivel de batería interna y disponibilidad de energía solar). Es una señal que envía Chaski RF, pensada para cuando se le instala en lugares en extremo aislados. Me lo imagino en pleno desierto, o entre los canales del sur… con las frecuencias publicadas en carreteras y parques nacionales, indicando cada cierto tiempo – «este es el sistema de comunicaciones para emergencias de…» -… Escuchar por la radio una voz humana en lugares tan remotos sin duda que reconforta.
Luego de unos cuantos diseños previos, así quedó la electrónica interna de Chaski RF:
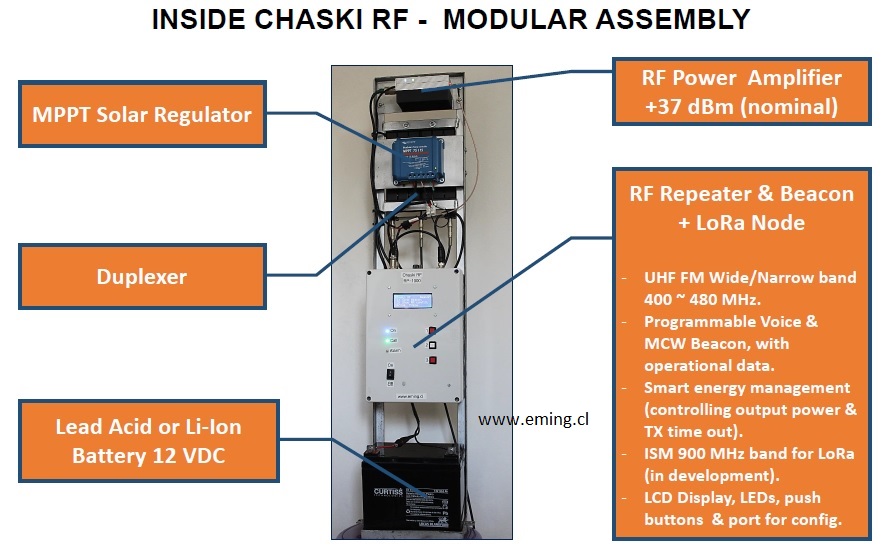
Foto 9. Vista interior de la estación repetidora Chaski RF. Se observa ensamblaje modular para facilitar cambio de partes y piezas. Cuenta con un display y puerto COM para conexión a PC, de modo de que podemos configurarlo en terreno.
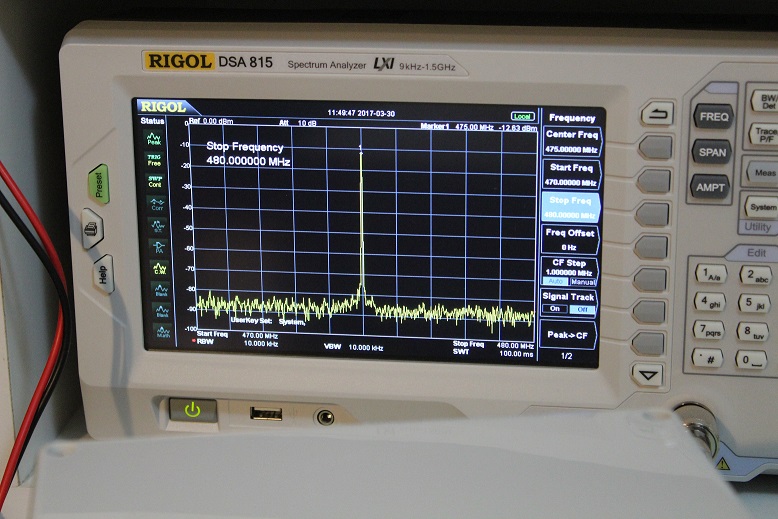
Y esta es la primera foto de su portadora, vista en el analizador de espectro:
Foto 10. ¡Habemus portadora! vista al analizador de espectro de la portadora emitida por Chaski RF (señal atenuada 40 dB).
Y bueno… había que hacer un up-grade en la carcasa…
Foto 11. Versión actual de Chaski RF.
El diseño exterior no es tan simple como parece. Debe responder a exigencias propias de estos sistemas, como:
Oscilaciones térmicas extremas: el equipo debe ser capaz de soportar temperatura ambiente entre los -20°C y 45°C, sin dañar la electrónica ni batería interna. Esto es muy importante, pues las baterías son muy susceptibles a daño por alta temperatura, y si es muy baja reducen dramáticamente su rendimiento. Por otro lado, la electrónica genera un poco de calor que debe ser adecuadamente disipado para evitar daños en componentes semiconductoras.
Soportar altos niveles de radiación solar directa, como ocurre durante los calurosos veranos.
Las partes metálicas deben ser resistentes a la corrosión, particularmente elevada en ambientes salinos (borde costero, territorio insular y zona de salares).
Resistencia metálica adecuada para enfrentar el viento y peso de la nieve. Este aspecto es muy relevante, pues Chaski RF no considera obras civiles que afiancen su anclaje al suelo. Cuenta con sistema de contravientos y estacas especialmente diseñadas para suelos rocosos. También está pensada para soportar el peso de la nieve, pero no para resistir avalanchas. Se debe escoger bien el sitio de instalación.
Foto 12. Prueba básica de resistencia mecánica de la estructura hecha por el team de diseñadores industriales de Chaski RF. Hay hartos kgs ahí… y la carga dinámica hace que esta sea una real prueba de fuego!.
Para satisfacer estas exigencias, contamos con el apoyo de un equipo de diseñadores industriales. En la foto, parte de este team en acción. Ojo que previo a estas pruebas, hubo memorias de cálculo para reducir riesgos, jejeje.
Primera pruebas en terreno de la versión actual.
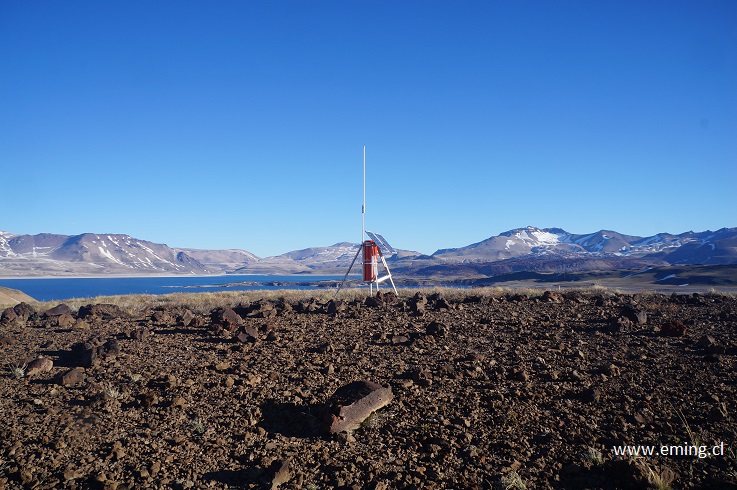
El montaje en terreno lo hicimos a pulso… tal como está pensado que se haga normalmente por parte del cliente. Nos acercamos en vehículo lo más que pudimos, y luego a «tracción humana» llevamos todo lo necesario. Escogimos un pequeño cerro, ubicado en el borde de la Laguna del Maule, por su buena visual hacia gran parte de la laguna y carretera internacional. Éramos 5 personas en esta faena. Entre 2 llevamos las mochilas «Chaski RF» con la estación «plug & play», otro llevaba el «cocaví», y los otras dos personas las herramientas y radios portátiles. Una vez en el sitio, lo montamos y salió al aire de inmediato.
Si bien llegamos exhaustos, no nos podemos quejar… es un lugar maravilloso. Es la mejor oficina para trabajar!!.
Foto 13. Lugar de instalación de Chaski RF para pruebas. Realmente de sobrecogedora belleza… y clima extremo. Un amigo geólogo nos comenta que es un centro volcánico potente.
Utilizamos la banda de 400 MHz, con una separación entre up-link y down-link de 5 MHz. Potencia de transmisión variable entre 1W y 5W, determinada por la lógica interna de operación. Para efecto de las mediciones, nos seguramos de mantener 5W (+37 dBm).
Una vez instalada la estación Chaski RF, uno de los integrantes del equipo se quedó con una radio, mientras que yo salí a recorrer la ruta con otra radio portátil (potencia TX de 4W y 0.3uV a 12dB SINAD en RX, antena portátil básica de 1/4 de onda). Hicimos pruebas de comunicacion en varios puntos, tomando coordenadas y marcando en el mapa el resultado más desfavorable en la comunicación (up-link o down-link). El resultado se observa a continuación:
Figura 1. Prueba de cobertura radial.
En la figura 1 se ha comparado el desempeño real del equipo, versus una simulación de propagación realizada con el software Radio Mobile (modelo de Longley – Rice, muy utilizado por colegas radioaficionados y estudiantes universitarios). Los parámetros de propagación se ajustaron para representar de manera adecuada el área de servicio observada. El modelo computacional se aproxima de buena forma a la realidad.
Pruebas como esta las repetimos en distintos lugares de la región, todas con éxito. En la última realizada, falló el amplificador de potencia del equipo por error de manipulación (lo hice operar sin haber conectado la antena, produciendo excesiva R.O.E., con lo que quemé el MOSFET de potencia de RF). Recordaré incorporar la electrónica para evitar que el equipo transmita cuando no tiene antena o esta esté desajustada. Tarea pendiente.
Video promocional
Casi terminando el proyecto con CORFO, con la dirección de Manuel Meza [de la productora ProImagen (del Maule)], y por supuesto el apoyo de todo su equipo, grabamos este video promocional. Quedó buenísimo, aunque confieso que algunas ideas de Manuel que no tomamos en ese momento, ahora vemos que hubieran sido buenas para los objetivos de este video. Los invito a verlo y a compartir!!.
Video 2. Spot promocional de Chaski RF. modelo RP-1000A. Quedó buenísimo. Excelente trabajo muchach@s.
Decidimos bautizar como Chaski RF modelo «RP-1000A» a esta estación repetidora de radio, y Chaski RF modelo «RP-1000AD» en caso que considere la funcionalidad LoRa. Esto porque a futuro tenemos pensado crear nuevos productos Chaski RF. Te invito a visitar el sitio web de esta solución en telecomunicaciones: www.chaskirf.com
A nuestras familias, por la empatía y buena disposición a colaborar.
A Mario Rojas Bastías, ingeniero comercial y magíster en finanzas. Por lejos, el mejor profesional del área financiera que conozco. Agradecimiento extensivo al Centro de Desarrollo de Negocios de Talca. A Andrea por su graaan ayuda con los trámites tributarios. A David, Vicente y Javi, por el bacán video pitch; y a Manuel, Maco y equipo, por el excelente video promocional. A Beatriz, Paula, Carolina, Oscar y Carlos, por el apoyo y buena onda desde IncubaUdeC. A Javier por su buen sentido de responsabilidad y experticia en la programación en JAVA de Raspberry Pi. A Aldo Aspilcueta y Paulo, por los buenos consejos sobre como emprender.
A CORFO por ayudar a democratizar las oportunidades, y por supuesto a tod@s quienes creen en l@s emprendedor@s tecnológicos.
Reflexiones, parte I.
Estoy leyendo un libro del físico chileno César Hidalgo, llamado «Why information grows?» («El triunfo de la información» es la versión en castellano), donde hace referencia a que el desarrollo industrial de un país es un indicador que puede entregarnos una idea del know how de sus ciudadanos, acumulado en empresas individualmente y en redes de estas. Conectando aquello con la realidad productiva y laboral de nuestro país, donde la mayoría de los cargos de ingeniero se enfocan en gestión, mantenimiento o a lo más en integración de tecnologías (es lo más ingenieril que me ha tocado conocer en la gran industria – en nuestro país sólo he conocido PYMES que se dedicaban a la manufactura electrónica, tarea que claramente demanda mayores conocimientos de ingeniería -), se hace de manifiesto que mucho conocimiento de ingenieros recién egresados y entusiastas por la especialidad electrónica, con el tiempo se pierde entre tareas que otra persona – sin formación técnica especializada, o con formación muy básica – podría hacer igual de bien en su lugar, desperdiciando la formación entregada por las universidades y, en algunos casos, frustrando profesionalmente a los egresados. Finalmente es tiempo, recursos y energía de gente joven que habitualmente se pierde en tareas administrativas que poco valor aportan a la actividad económica que desarrollan (o al menos que cualquier persona no técnica podría hacer en su lugar, obteniendo el mismo resultado).
Si bien hay esfuerzos que apuntan en la dirección de mejorar nuestra capacidad en I+D+i, como los que hace la CORFO y algunas pocas universidades (mi respeto a la U. de Chile con su SUCHAI y el AMTC), creo que el mundo privado está muy al debe en este aspecto. Espero que como sociedad seamos capaces de salir de nuestra dependencia de las típicas empresas dedicadas a la extracción de materias primas o a servicios de bajo valor agregado, y nazca una nueva generación de empresarios que apuesten por la innovación con base tecnológica. Necesitamos ese up-grade mental en Chile y Latinoamérica. El primer país que lo haga será punta de lanza para que nuestra región florezca.