(Short tilted terminated folded dipole antenna T2FD for HF band)
Establecerse en la ciudad conlleva casi necesariamente la imposibilidad de instalar buenas antenas para las bandas bajas, y a veces no queda más alternativa que buscar una antena de reducido tamaño que nos permita operar – aunque sea con baja eficiencia – en estas bandas. Es así como decidí construir una antena T2FD (tilted terminated folded dipole, lo que sin traducir textualmente significa dipolo plegado terminado en carga lineal), la cual tiene la particularidad de presentar una relación de onda estacionaria adecuada en un amplio ancho de banda (hay modelos con ROE < 2.0 en toda la banda de HF, y <3 incluso hasta 50 MHz), lo que la hace muy adecuada para equipos que operan en múltiples bandas. Sin embargo, su eficiencia no es tan elevada como un dipolo u otro tipo de antena resonante. Es una antena muy utilizada en comunicaciones HF profesionales y para receptores de onda media y onda corta, siendo una excelente alternativa para receptores SDR multibanda.
En lo que sigue, construiré una en base a lo expuesto en el sitio web http://www.packetradio.com/, con un balún de diseño propio.
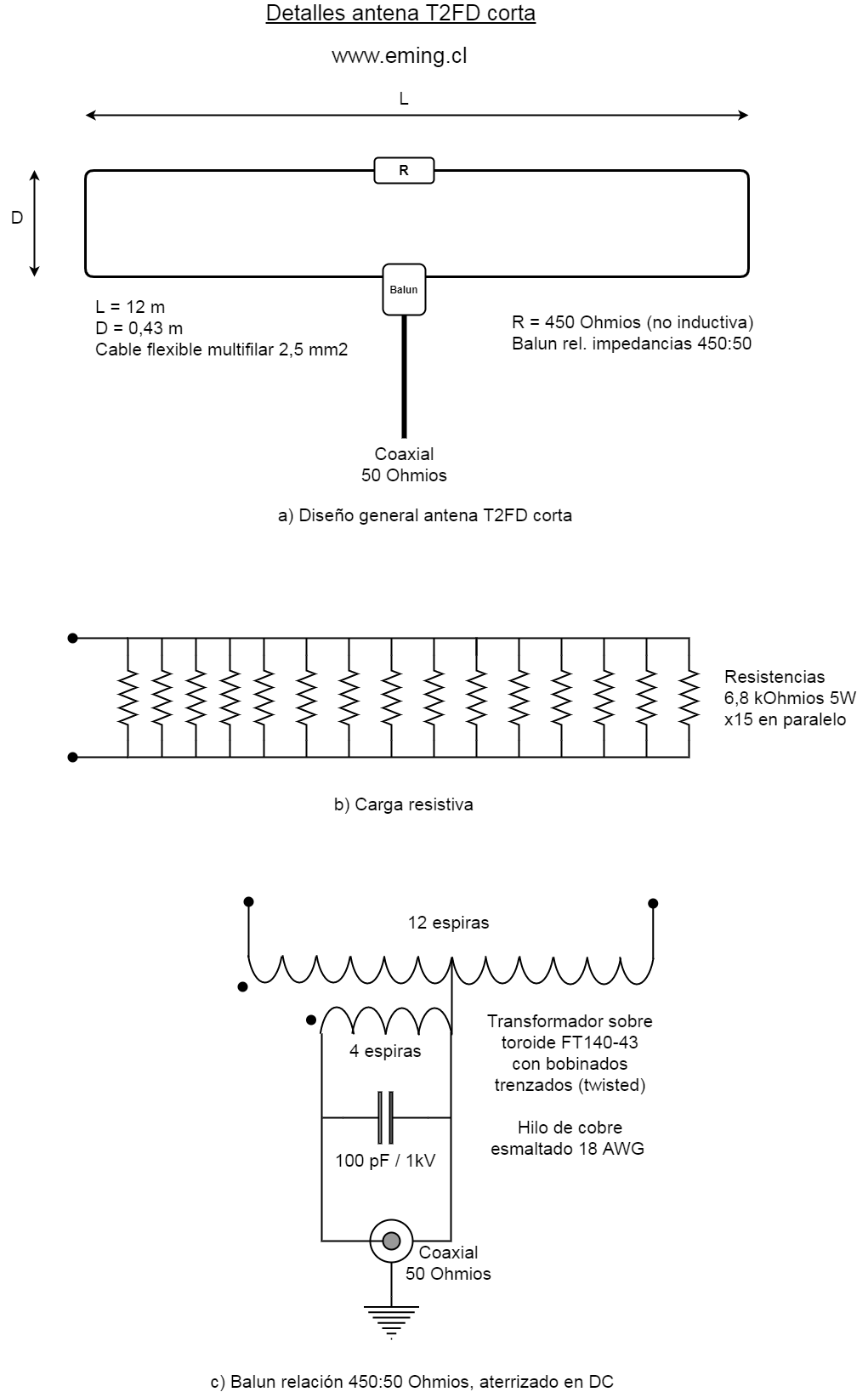
Figura 1: antena T2FD corta montada sobre segmento de torre a 6 metros, en forma de «V invertida».
Se trata de una antena de tipo «onda viajera no resonante», cuyo diseño conceptual tenemos en la Fig. 2. Destaca su pequeña longitud para ser de HF (sólo 12 metros lineales), lo que hace sencillo adaptar su instalación a espacios reducidos, como patios en zonas urbanas, sobre techumbres o al interior de áticos de madera con techo dieléctrico. El diseño está pensando para utilizarse en toda la banda de HF (160 a 10 metros) en comunicaciones de banda lateral única (SSB) con un máximo de 50 W P.E.P., aunque se espera que la eficiencia de esta será alta sólo en las bandas cuya longitud de onda sea inferior a unos 24 metros. Si se desea incrementar su eficiencia en las bandas bajas, es necesario extender el largo L (ver Fig. 2.a) a lo menos 0,4 veces la longitud de onda de la banda de frecuencias más baja a utilizar.
Esta antena posee un loop radiante con 6 metros de longitud por lado (en total 12 metros), con un ancho de 0,43 metros. Es alimentada a través de un BalUn cuya relación de transformación de impedancias es 450:50 Ohmios, siendo el lado de alta impedancia el que alimenta el loop balanceado y el otro extremo el que se conecta a la línea coaxial de bajada de 50 Ohmios desbalanceada. Al otro extremo del loop, se ubica la carga resistiva de 450 Ohmios, cuya capacidad de disipación de potencia es de 75 W.
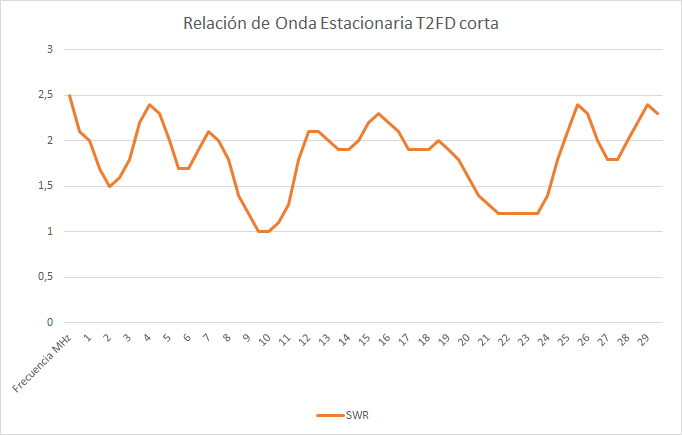
Como lo indiqué al principio de este artículo, la relación de onda estacionaria medida en esta antena para la banda de HF es aceptable en todo el rango (menor a 1:3), tal como lo vemos en la Fig. 3. Sin embargo, esto no es garantía de un alto desempeño pues, dependiendo de la frecuencia en que se esté operando, parte de la potencia de transmisión (o recepción) se disipa en forma de calor en la carga resistiva y no es aprovechada para el contacto radial.
Figura 3: relación de onda estacionaria de esta antena T2FD corta, medida con el analizador de antenas MFJ-269C.
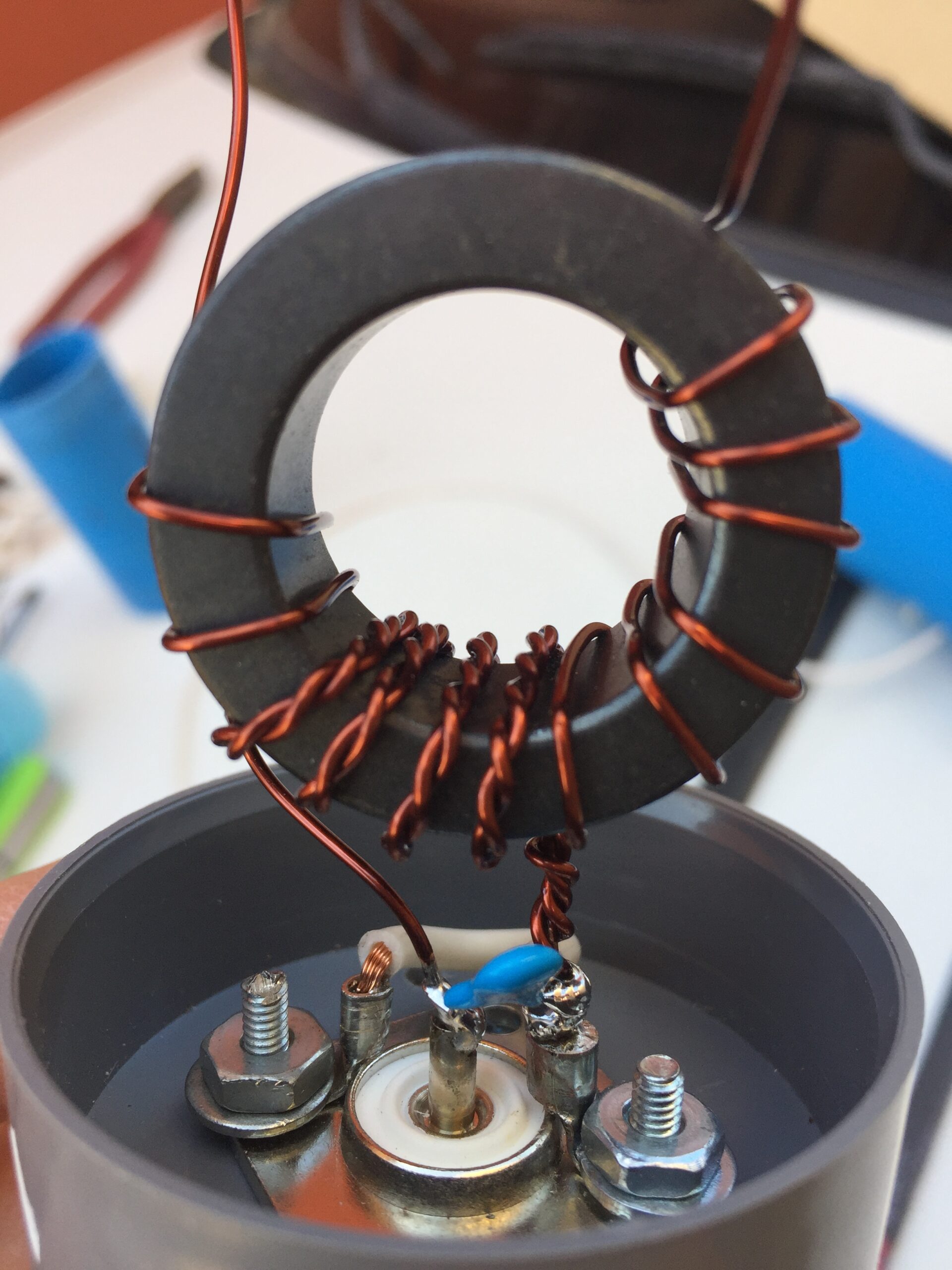
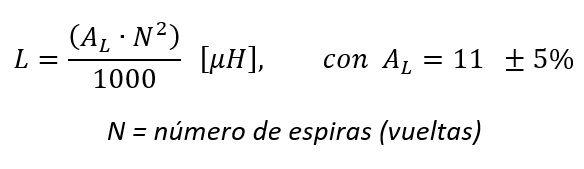
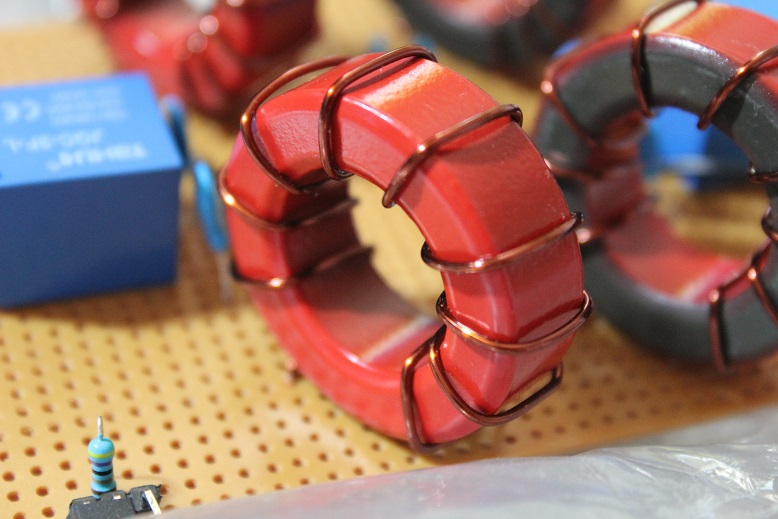
El balún se construye en torno a un toroide FT140-43, con 4 espiras en el lado de 50 Ohmios y 12 en el lado de 450 Ohmios. El centro del lado de alta impedancia está conectado a tierra, quedando este punto común entre ambos devanados y conectado a la malla exterior de la bajada coaxial. Primario y secundario se enrollan trenzados (o retorcidos entre sí). En la Fig. 4 podemos ver el detalle de este transformador adaptador de impedancias.
Figura 4: construcción del balun 9:1.
La cantidad de espiras por devanado las calculé pensando en lograr un adecuado equilibrio entre lo que significa reducir las corrientes de magnetización en las bandas bajas y también minimizar el efecto de las reactancias de fuga en la parte alta de la banda de HF. Estas reactancias serie las compensaremos parcialmente con el capacitor de 100 pF en paralelo que puse en el lado de 50 Ohmios, lo que mejorará el comportamiento del balún en la parte de alta de la banda de HF, pero acotará el ancho de banda del balún hasta pocos MHz por sobre la banda de HF. Aprovechando material remanente de otros proyectos y luego de algo de ensayo – error, llegué a este valor del capacitor (que podemos ver en la Fig. 5).
Es importante mencionar que el balún es de voltaje puesto que conecté el punto medio del lado de alta impedacia (balanceado) a tierra (GND), para así dejar aterrizado el loop. Esto es para evitar arcos eléctricos y consecuentes daños en receptores por estática, especialmente durante eventos atmosféricos o cuando el aire está muy seco. Si la antena no está perfectamente balanceada en su montaje, será necesario incluir un choque de RF para evitar corrientes de modo común por desbalances, lo que se resuelve fácilmente enrollando unas 16 espiras de coaxial RG-58 en un toroide FT240-43 justo luego del punto de conexión entre la línea y el balún de la T2FD.
Figura 5: balun 9:1 con capacitor 100pF paralelo en lado de 50 Ohmios.
Respecto de la resistencia, es muy importante que sea resistiva (pura) a la frecuencia de operación (especialmente a las frecuencias más altas, en torno a 30 MHz, pues allí se incrementa el efecto de las reactancias). Esto se logra en forma aceptable con 15 resistencias de hilo bobinado en paralelo (que tienen componente inductiva, pero al estar en paralelo reducen su magnitud total), de 6,8 kOhmios y una capacidad de disipación 5 Watts cada una. Este diseño lo obtuve de un video mostrado por XQ2CG (gracias Sergio), donde analiza esta resistencia de una reconocida marca comercial.
Figura 6: carga resistiva 450 Ohmios.
Tanto el balún como la resistencia de carga las monté al interior de un tubo de PVC hidráulico de 50 mm de diámetro, sellados con tapas de PVC pero con aberturas en la parte inferior para evaluación de humedad. Las componentes internas las fijé con sellador de poliuretano (Sikaflex 221, gracias Manfred XQ6FOD por el dato… pero ojo que es un compuesto muy tóxico… úsese tomando todas las precauciones del caso), procurando cubrir las partes sensibles a la oxidación y dejando la mayor superficie disipadora posible en las resistencias de carga y toroide de ferrita, con el objetivo que puedan disipar calor al ambiente.
Y finalmente, para el loop utilicé conductor de tipo eléctrico superflex de 2,5 mm2, con separadores construidos de conduit eléctrico de PVC 16 mm, en segmentos de 50 cm de largo cada 2 metros. La fijación del conductor a los separadores está hecha con amarras plásticas para cables, reforzada con pegamento para darle más durabilidad a la intemperie. La unión de ambos brazos, balún y resistencia de carga la hice en un trozo de tubo de PVC hidráulico de 50 mm de diámetro, habilitando en este tubo un agujero para pasar un alambre que permite la instalación en el soporte central (en este caso, la torre). Obtuve una antena robusta, aunque no muy liviana.
Figura 7: brazos del loop de esta antena t2fd corta en proceso de construcción.
Comentando en términos generales, esta antena me ha sorprendido gratamente. En recepción es bastante silenciosa (presenta un bajo nivel de ruido en comparación a otras antenas que he probado) y sirve en RX para todo el espectro de onda media y onda corta. He disfrutado la recepción de todas las bandas con bajo ruido… incluso en la banda AM de onda media… una maravilla. Tengo la idea que en una instalación más adecuada (horizontal y a mayor altura) debe ser aún mejor. En la medida que la vaya probando les comentaré, especialmente lo relativo al rendimiento en TX en las bandas bajas, que es donde debería ser menos eficiente.
(HF End Fed Half Wave multiband antenna, for 40, 20 and 11/10 meter band).
Buscando una alternativa fácil de instalar, simple y menos aparatosa para implementar una antena multibanda capaz de operar en las bandas de 40, 20 y 11/10 metros, llegué a la famosa antena de media onda alimentada en un extremo. A través de E-bay adquirí una versión comercializada por Par Electronics, la EF-10/20/40 MKII, con la que comprobé efectividad y bajo ruido de este tipo de antenas cuando operan en forma horizontal.
Si deseas conocer en detalle esta antena, te recomiendo visitar el excelente sitio web de Steve Yates AA5TB (www.AA5TB.com). Por mi parte, haré sólo una breve descripción teórica, pues me enfocaré en la construcción de esta EFHW para 10/11, 20 y 40 metros, y en mostrar los resultados obtenidos. Los detalles constructivos están basados en el artículo publicado por PA3HHO (https://pa3hho.wordpress.com/end-fed-antennes/multiany-band-end-fed-english/). Mi idea es reproducir este trabajo y contar mi experiencia. En caso de surgir alguna mejora posible, también la comentaré.
¿En qué consiste la antena EFHW (Antena Multibanda de Media Onda Alimentada en un Extremo)?
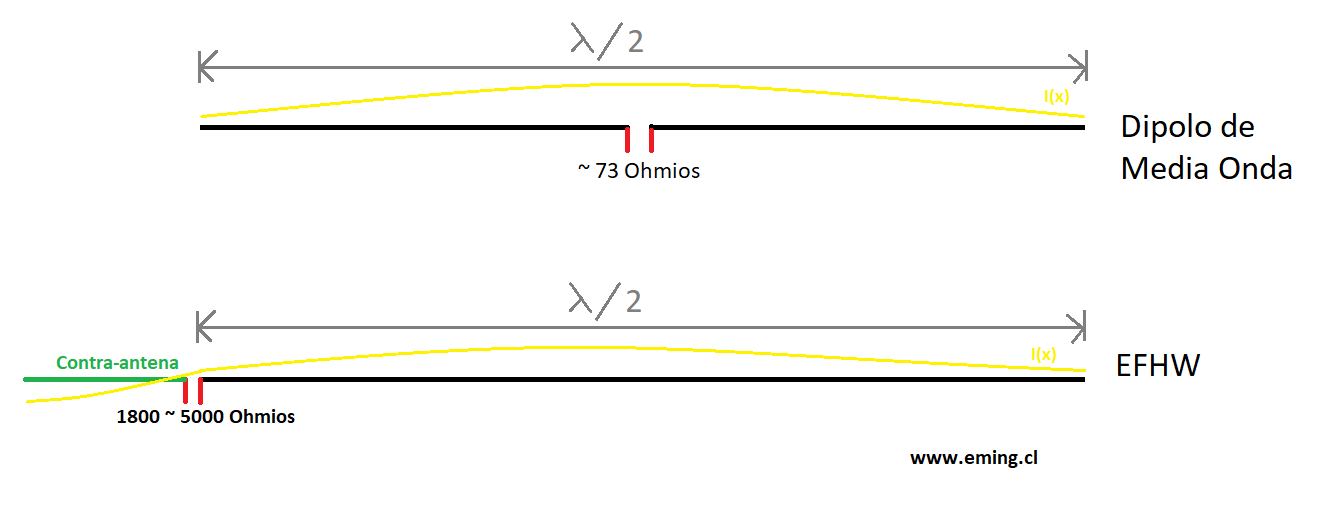
Es un dipolo de media onda, pero en vez de conectarse la línea de bajada en el centro, se conecta en un extremo (ver Fig. 1). A mi parecer, la gran gracia de esta antena es que podemos utilizar el mismo hilo radiante para varias bandas de frecuencias armónicas, puesto que un hilo conductor de media onda a la frecuencia F, resonará en onda completa completa a 2*F, y en 3/2 de onda a 3*F, y así sucesivamente, siendo el punto de alimentación (en un extremo) siempre de impedancia muy elevada. Por ello, podemos construir antenas mutibanda utilizando un único hilo radiante, lo que hace más facil su instalación y uso como antena portable (por ejemplo, en salidas a acampar).
Al alimentarse en un extremo, como se mencionó anteriormente, la impedancia en el punto de alimentación es altísima (de 2000 a 3000 Ohmios), y por lo mismo requiere un adaptador de impedancias si se quiere conectar a la línea de 50 Ohmios. Típicamente, se usa un transformador de banda ancha con núcleo de ferrita toroidal o binocular, como veremos más adelante.
Fig.1. Comparación entre dipolo de media onda alimentado en el centro, y dipolo alimentado en un extremo. En amarillo, forma aproximada de distribución de la corriente. Notar que es máxima en el centro, lo que explica el hecho que también la impedancia es mínima; mientras que el el extremo la corriente es mínima (y máximo el voltaje), definiendo una alta impedancia.
Si se tiene una alta impedancia en el punto de alimentación, observaremos que la tensión de RF durante TX se eleva a varios kV si utilizamos potencia considerable, lo que hace críticas las características constructivas del módulo adaptador de impedancia. Por otro lado, habitualmente se ocupa el recubrimiento exterior (malla) del cable coaxial de bajada de antena como contrapeso (o contra-antena), lo que hace que este se comporte como parte del sistema radiante y por lo mismo se generan corrientes en modo común que eventualmente pueden afectar el rendimiento de la antena y la captación de ruido. Estas corrientes de modo común se pueden reducir drásticamente mediante el uso de un filtro de modo común (o balún de corriente, o choque de RF), el que debe ser instalado previo al ingreso de la línea coaxial al cuarto de radio. Así evitaremos meter RF en nuestros equipos cuando estemos en TX, y a la vez reduciremos la captación de ruido por parte de la línea coaxial en RX.
Para la adaptación de impedancias, la razón de transformación más utilizada es 1:8, donde en el lado de baja impedancia tenemos la línea de 50 Ohmios y en el lado de alta se coloca el hilo radiante de longitud eléctrica equivalente a media longitud de onda de la señal radiada (o recibida). Con esta razón de transformación tenemos mayor independencia de la R.O.E. (SWR) respecto del largo de la contra-antena (o contrapeso de la antena), siempre y cuando este sea superior al 10% de la longitud de onda de operación de la antena (ver sitio de AA5TB). Por lo mismo, si se trata de antenas multibanda, podemos escoger una longitud de contra-antena entre el 10% y 50% de la correspondiente a la frecuencia más baja de operación (en nuestro caso, banda de 40 metros).
Construyamos nuestra EFHW.
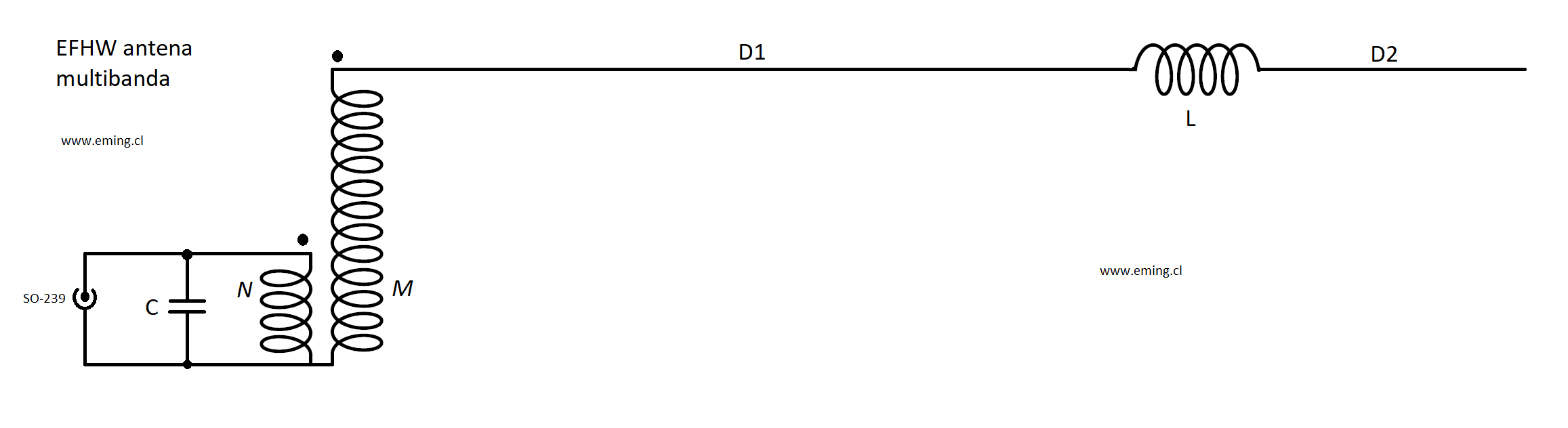
El diseño para las bandas de 40, 20 y 10 metros es el mostrado en la siguiente figura:
Fig.2. Esquema eléctrico de una antena EFHW de 3 bandas. N = 2 y M = 16, sobre núcleo toroidal de ferrita FT140-43. C = 150 pF/ 500V cerámico. Se utiliza el cable coaxial de bajada como contra-antena.
En 40 metros, el hilo se comporta como un brazo de media longitud de onda, recortado gracias a la presencia del inductor L, en nuestro caso de 34 uH. De este modo, logramos acortar el largo total de la antena, o sea D1 + D2 es menor que media longitud de onda en 40 metros, lo que a su vez reduce el ancho de banda y rendimiento en 40 metros.
Para las bandas de 20 y 10 metros, el inductor L se comporta como un choque de RF, es decir, como una impedancia tan elevada que prácticamente no permite el paso de corriente de RF hacia el tramo final de la antena (D2). De este modo, para 20 y 10 metros el largo total de la antena es D1, donde en el caso de 20 metros corresponde a media longitud de onda, mientras que en 10 metros a una longitud de onda completa, donde ambas maximizan su impedancia en el extremo.
Fig. 3 Antena EFHW para las bandas de 40, 20 y 10/11 metros.Fig. 4 Adaptador de impedancias antena EFHW para 40, 20 y 10 metros.
El transformador se ha hecho en base al toroide FT140-43 (Ver http://toroids.info/FT140-43.php), formado por 2 espiras bifilares + 14 espiras, con hilo de cobre esmaltado tipo 18 AWG. El secundario lo he enrollado en partes opuestas del toroide, con el objetivo de reducir capacitancias parásitas entre ambos extremos del bobinado. El toroide está recubierto de cinta dieléctrica para proteger la aislación del hilo que conforma el adaptador de impedancias, lo que no significa un problema pues en QRP no tendremos calentamiento del núcleo toroidal.
Para acortar la longitud de la antena de 40 metros, y también para aislar el último tramo de la antena (D2) en la operación de las bandas de 20 y 10 metros, se utiliza un inductor de L = 34 uH. Consiste en 65 vueltas de hilo 18 AWG sobre una tubo de PVC de 1 pulgada de diámetro.
Con el objetivo de obtener una satisfactoria operación del adaptador de impedancias en la banda de 10 metros, he colocado un capacitor de 150 pF en paralelo con el lado de baja impedancia del transformador (probando desde 50pF hasta 200pF, es el que mejor resultado ha dado). Debe soportar por lo menos 500V, como es en este caso, lo que es suficiente para operar equipos con potencias QRP (5W P.E.P o inferior), pues cuando se eleva la R.O.E. esta tensión puede llegar a máximos bastante elevados.
Luego de varias pruebas, las longitudes óptimas para D1 y D2 son:
D1 = 10.1 [m]
D2 = 1.6 [m]
Ajustadas a mi instalación en particular. Dependiendo del valor exacto de la inductancia, de la disposición del hilo radiante (horizontal, vertical o «v» invertida), del entorno (influencia de estructuras conductoras cercanas), tipo de suelo, trazado de la línea de bajada y postura de balún para filtrar corrientes en modo común, estas longitudes pueden variar.
Ensayos preliminares me han mostrado resultados interesantes… QSOs en la banda de 40 metros a más de 500 km de distancia, y en 10 metros a más de 2.000 km!, con sólo 5 W p.e.p. Una maravilla. Es ideal para salidas a terreno, pues su instalación es muy sencilla. Faltaría medir su eficiencia, especialmente el efecto del transformador toroidal, pero independiente de eso, lo fácil de su construcción, instalación, operación multibanda y experiencia de uso la hacen una opción interesante.
ACTUALIZACIÓN 06/10/2020: llegaron mis núcleos toroidales FT240-43!! pronto un nuevo artículo referente a esta antena…
Aunque… por el momento, un adelanto en la Fig. 5:
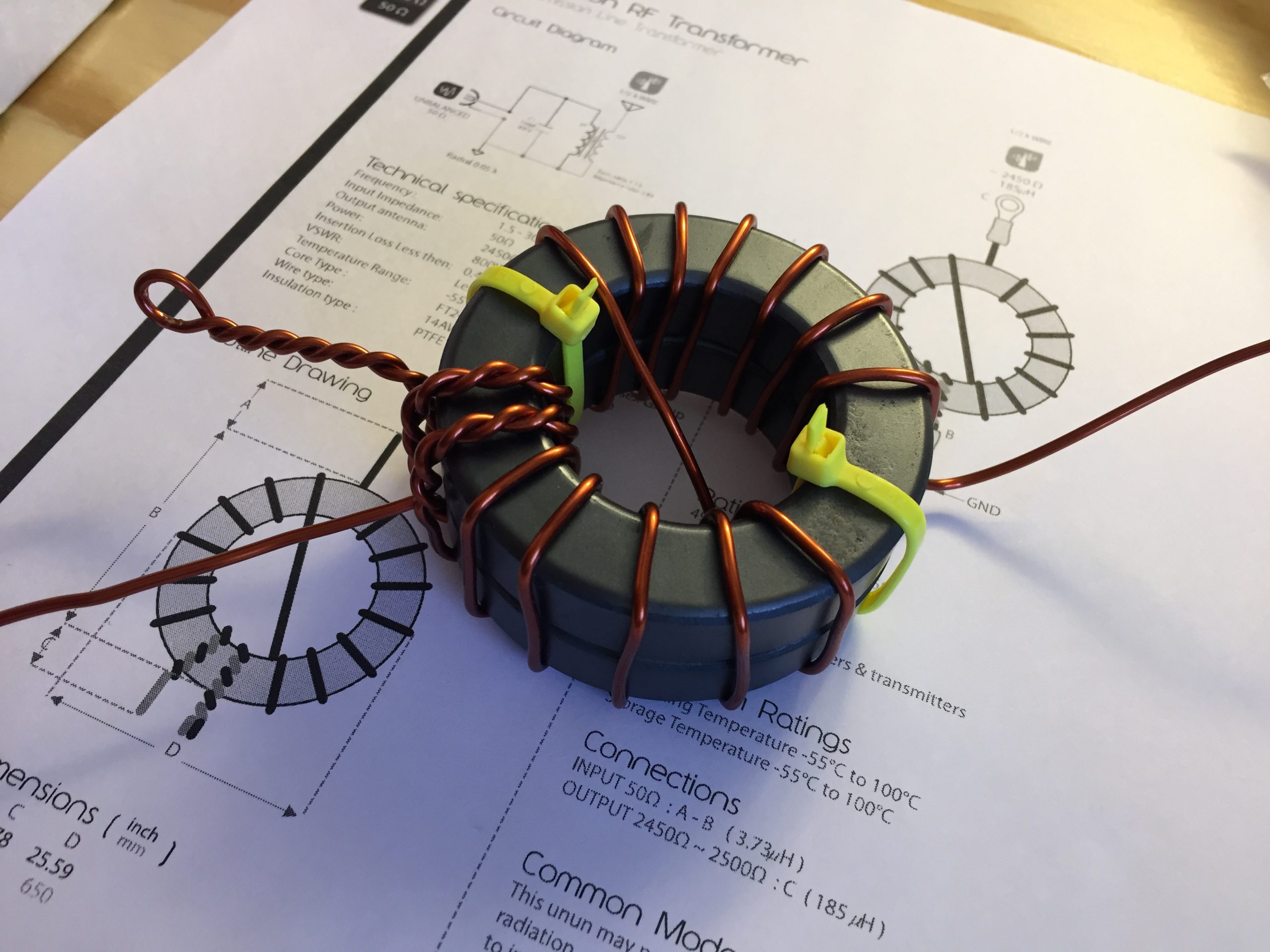
Fig.5 Construcción de un nuevo adaptador de impedancias, basado en el núcleo toroidal de ferrita FT240-43.
Luego de revisar experiencia práctica de entusiastas experimentadores, he considerado en este nuevo diseño el uso de 2 núcleos toroidales apilados de tipo FT240-43. Según algunos autores, la eficiencia de este transformador es superior al 80% en toda la banda de HF, cuando se le utiliza con una relación de transformación de 49:1, un capacitor de 100 pF en paralelo con la entrada y una carga resistiva pura de 2450 Ohmios. Mi idea es probar este diseño de adaptador de impedancias para utilizar esta antena con más potencia (los 100 Wpep que entrega mi FT-450D) y extender el uso a la banda de 80 metros.
(Homebrew SSB 40 meter band transceiver, based on ILER 40 kit and DDS VFO)
Hace ya bastante tiempo que quería probar el ILER 40, kit transceptor SSB para la banda de 40 metros desarrollado por EA3GCY, pues se trata de un circuito bastante simple con muy buenos comentarios en foros de radioafición. El diseño original utiliza un oscilador local basado en cristal de cuarzo, al que se varía levemente la frecuencia a través de condensador variable (polyvaricon). Construyendo tal cual el Iler 40 obtuve un resultado bastante bueno, destacando el bajo consumo de energía (ideal para operar con baterías) y mínimo nivel de ruido (al no tener circuitos digitales, es bastante silencioso en RX). Sin embargo, el control de la frecuencia de operación no es del todo adecuado, pues el rango de frecuencias que abarca en VFO es de no más de 40 kHz (muy inferior a los 300 kHz de toda la banda) y no cuenta con una visualización de esta. Además, quiero disponer de acceso rápido a frecuencias de uso habitual, como lo son los 7.050 kHz (Frecuencia Nacional de Encuentro), 7.085 kHz (Red Nacional de Emergencias de Chile), 7.148 kHz (Rueda de la Amistad), las que quiero almacenar en memorias fácilmente reconfigurables. Otro aspecto importante es que necesito disponer de un «Clarificador» SSB, donde pueda desplazar la frecuencia RX sin afectar la de TX, para así recibir en forma adecuada aquellas estaciones que estén desplazadas en frecuencia.
Todas estas mejoras se pueden hacer en forma rápida, sencilla y económica si utilizamos como VFO un sintetizador digital directo. En el comercio encontramos el módulo DDS basado en el chip AD9850 de Analog Devices, con un generador de reloj de 125 MHz. Como resultado, obtuve el transceptor mostrado a continuación:
Estación QRP para 40 metros, B.L.U., basada en kit Iler 40. (SSB QRP Station, 40 meter band, based on Iler 40 kit).
Vista frontal del QRP
Vamos a construirlo….
Básicamente, lo que debemos construir es un sintetizador de frecuencias que cubra un rango adecuado como oscilador local. La frecuencia intermedia en TX y RX del Iler 40 es F.I. = 4.913 kHz, y a través de ensayos he observado que la frecuencia óptima de OffSet para el VFO es de 4.913,52 kHz (desviación adicional que permite óptimo ajuste al filtro para banda lateral inferior). Por lo tanto, la frecuencia de salida del VFO debe variar entre (7.000 + 4.913,52) kHz y (7.300 + 4.913,52) kHz para cubrir toda la banda de 40 metros (7.000 a 7.300 kHz). A través de la programación del microcontrolador se puede extender levemente el rango de operación, pero ya estaría fuera del rango de frecuencias para radioaficionado. Pruebas técnicas me confirman que el Iler 40 anda bien entre los 6,8 y 7,3 MHz. También es posible reducir el rango de operación a sólo aquel en que se trabaja fonía SSB.
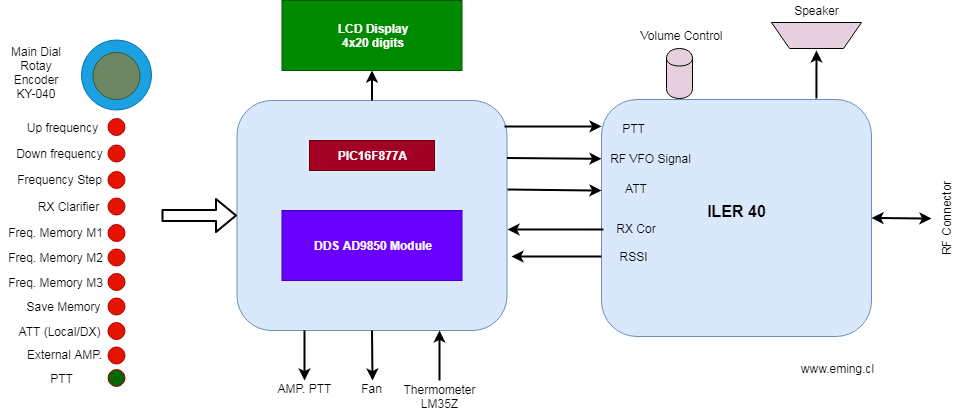
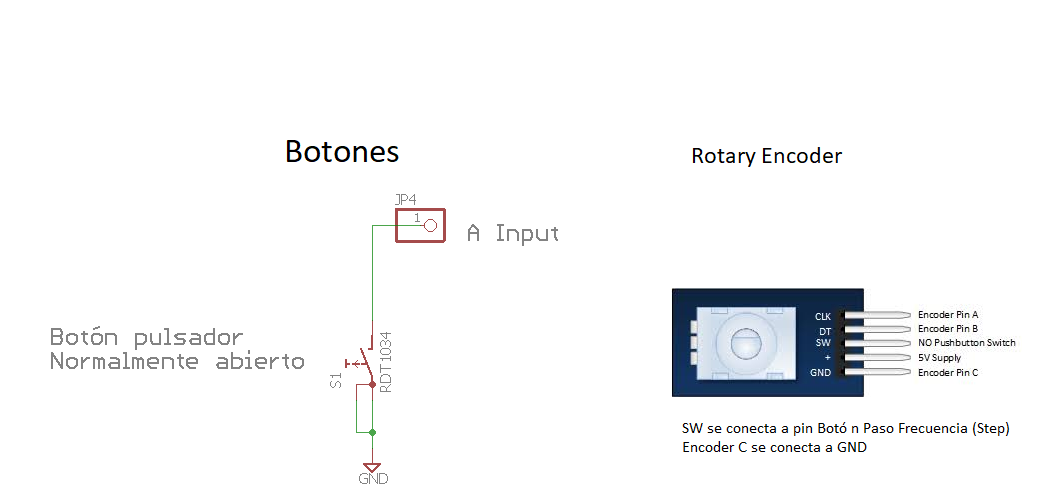
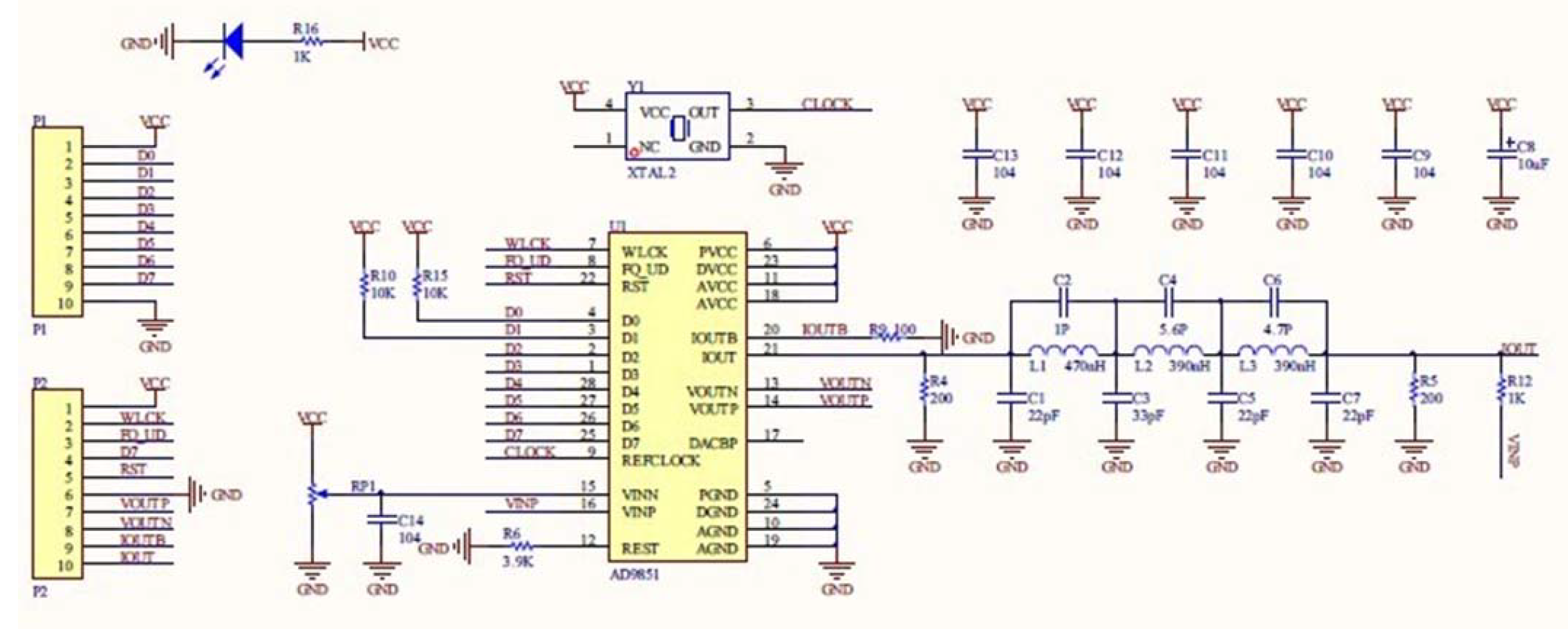
El centro de nuestro diseño será el sintetizador digital directo AD9850 de Analog Devices, el que adquirí en forma de módulo que incluye el generador de reloj a 125 MHz y filtro elíptico anti-alias. Estará comandado por el microcontrolador de Microchip PIC16F877A (mi viejo caballo de batalla). Utilizaré un display de 20×4 caracteres, pulsadores (botones) y el codificador rotatorio de bajo costo KY-040 para el dial principal.
Conexiones entre Iler 40 y el hardware diseñado por mi para este transceptor (imagen extraída de mi post en inglés).
Más información sobre Síntesis Digital Directa en este link, artículo que publiqué en mi web hace algunos meses.
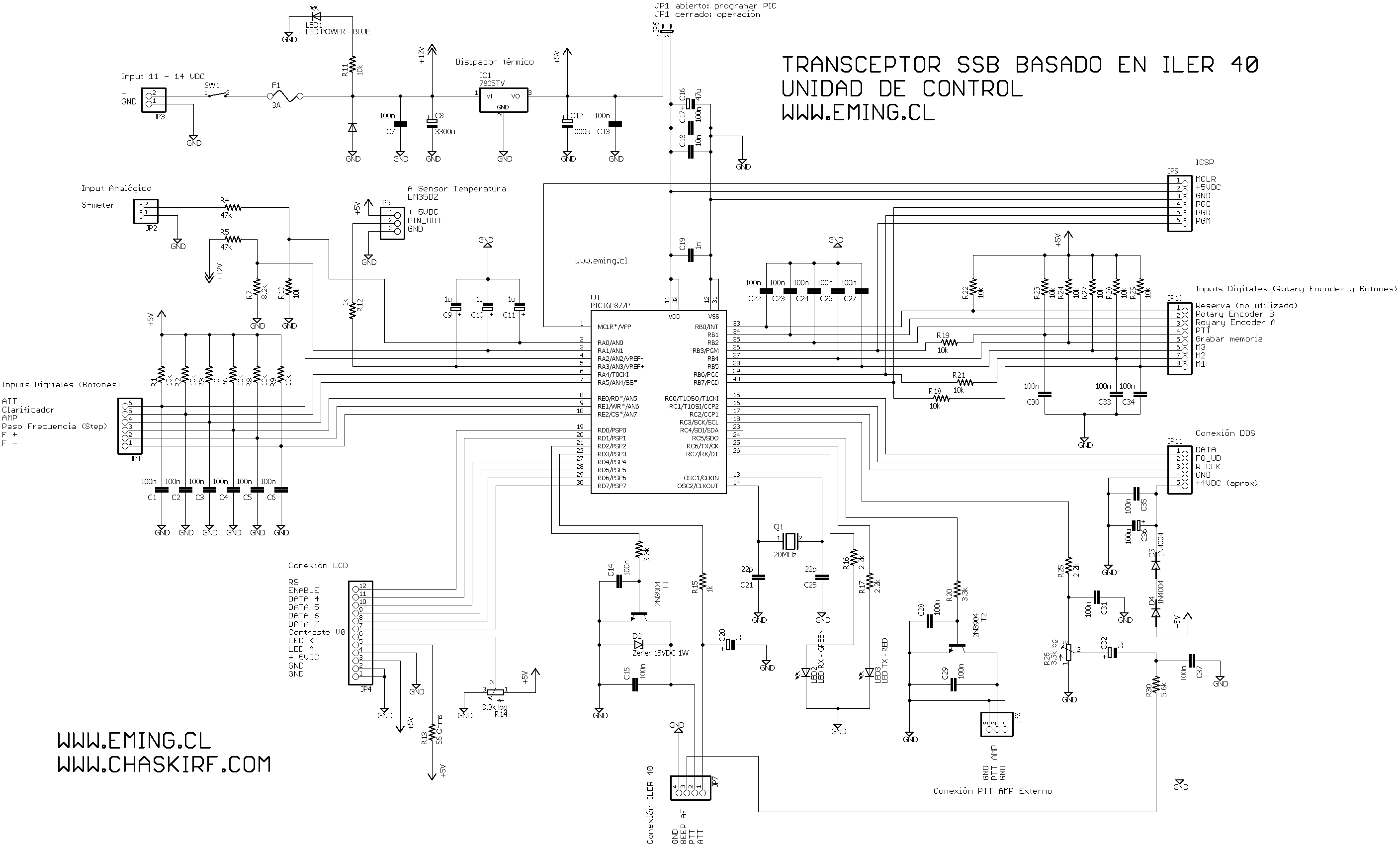
El circuito implementado es el que muestro a continuación:
Esquemático de la unidad de control, construida en base al microcontrolador PIC16F877A y el sintetizador digital directo AD9850. (Haz click sobre la imagen para ver detalles).
Conexionado botones y Rotary Encoder KY-040.
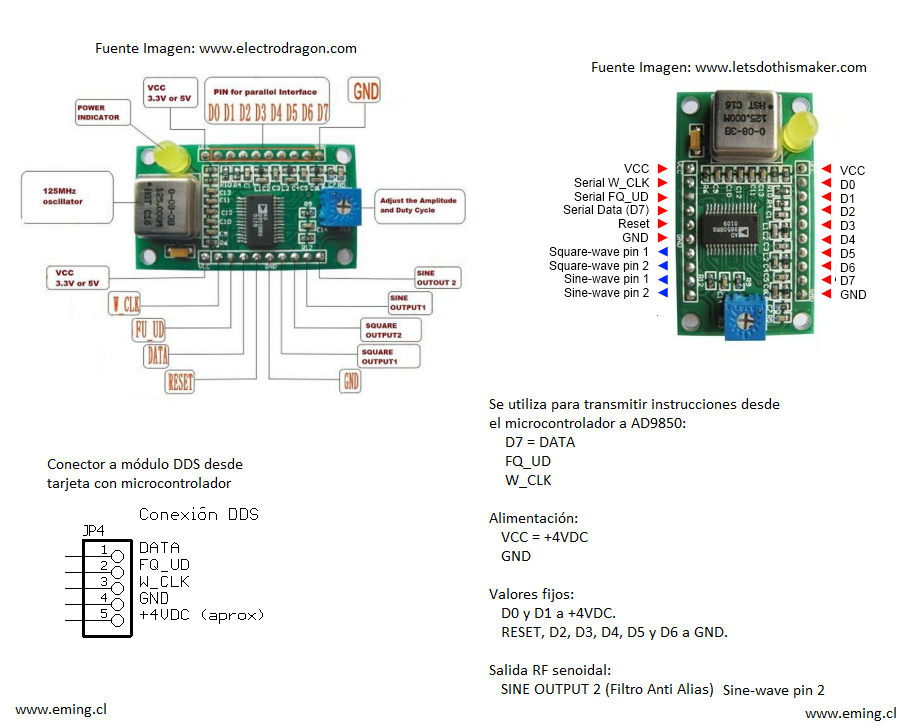
Conexionado entre unidad de control y módulo DDS. Salida filtrada de RF se conecta a pin L.O. (Oscilador Local) en Iler 40. Haz click para agrandar imagen.
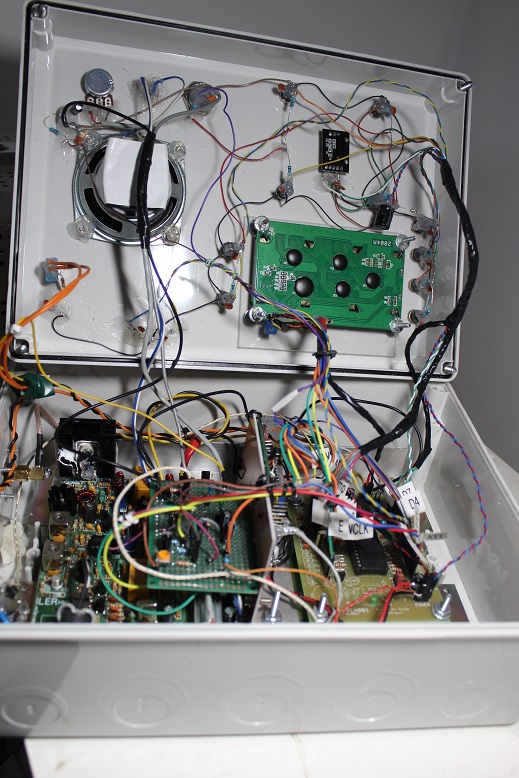
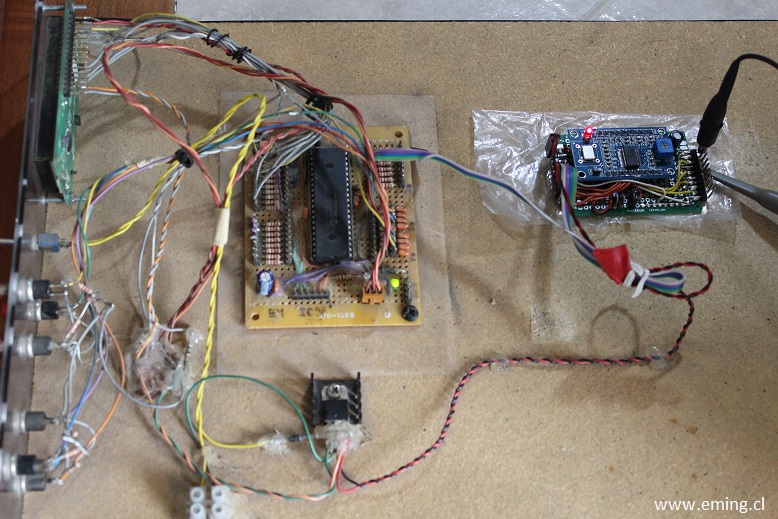
Vista general del interior del transceptor.
Tarjeta de RF Iler 40, desarrollado por EA3GCY, con PCB con circuitos necesarios para operar el Iler 40 desde el microcontrolador. Más info sobre el Iler 40, visitar la web www.qrphamradiokits.com.
Instalación del transistor de salida (en este caso un 2SC2078) con un buen disipador térmico.
Vista de circuitos digitales de este QRP. Se observa tarjetas con DDS AD9850 y PIC16F877A.
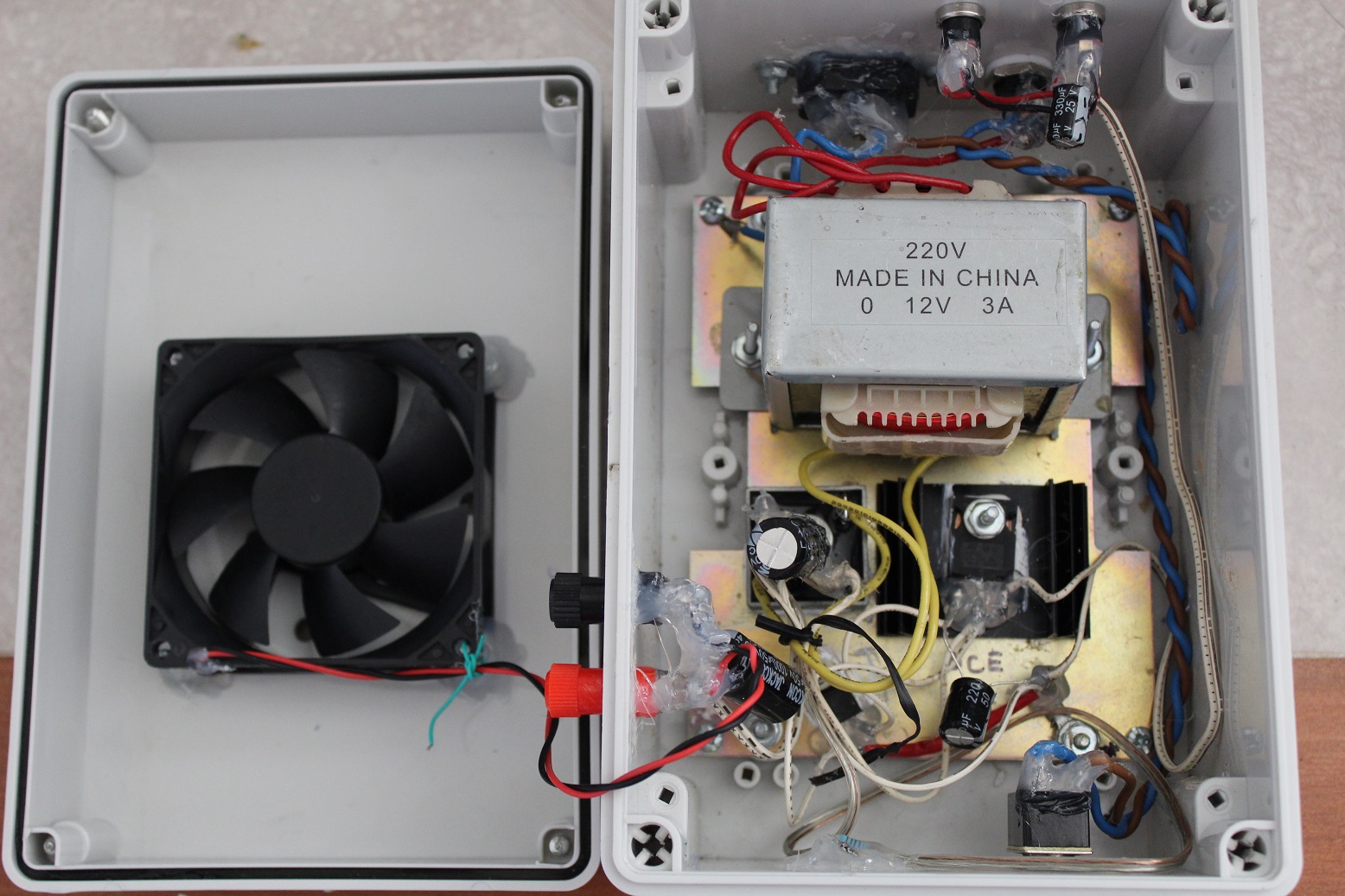
También construí una sencilla fuente de alimentación lineal de 12VDC 3A, a la que dispuse 2 jack de salida. Conecto este QRP en uno de estos jacks, mientras que el otro lo utilizo para el FT-817ND.
Interior de la fuente de poder lineal 12VDC 3A para QRPs.
La fuente anda bastante bien. Le puse un ventilador de 24VDC, pero alimentado directamente desde el puente rectificador (previo al regulador de voltaje), recibiendo unos 16VDC, con los que opera más lento y, por ende, menos ruidoso. El flujo de aire generado es suficiente para mantener una adecuada temperatura en la circuitería, especialmente en el transitor de paso de corriente (un TIP35C). Pronto publicaré detalles constructivos de esta fuente. ACTUALIZACIÓN: Este es el link con detalles de la fuente de poder.
Y bueno… una breve prueba RX con una antena de hilo largo. No lo hice operar en TX pues arriesgo el transistor de potencia, dada la elevada R.O.E. de esta antena. En todo caso, pruebas con carga fantasma me indican que el equipo entrega unos 4W P.E.P. sobre 50 Ohmios.
Notarás que el equipo hizo ruidos extraños cuando acerqué la cámara con que grabé este video. Ocurre porque la electrónica de RF no está apantallada (es una caja plástica!), lo que la hace sensible a ruidos electromagnéticos generados por fuentes cercanas, como mi teléfono celular.
Cuando el tiempo y el espacio me lo permitan, construiré una antena para 40 metros y les mostraré nuevos videos de este sencillo y efectivo transceptor SSB.
Si te animas a contruirlo y necesitas orientación, no dudes en escribirme.
(Low pass filter for 80 and 40 meters HF bands – 5 poles, first try)
Un amplificador de potencia ideal sería aquel en que, para una señal de entrada dada, la señal de salida tiene una forma de onda tal que se puede expresar de manera exacta a través de la multiplicación de un valor escalar por la señal de entrada. Sin embargo, los amplificadores tienden a inducir distorsión en la señal de salida, generando espurias por intermodulación (presentes cuando se aplica más de una frecuencia de entrada al amplificador de potencia) y componentes armónicas (múltiplos enteros de la frecuencia fundamental – portadora -).
Estas distorsiones se deben a no linealidades en el comportamiento del amplificador, causadas por: no linealidades en la respuesta amplificadora de los dispositivos semiconductores – MOSFET o BJT -, saturación del amplificador, componentes comportándose en forma asimétrica en ambos semiciclos de la señal de entrada, saturación de transformadores de RF o choques, etc.. Amplificadores tipo push-pull (o en contrafase) tenderán a generar menos distorsión debido a la simetría en su operación, versus aquellos que poseen un único dispositivo semiconductor de salida.
Ahora bien, como no existe el amplificador ideal, en nuestros equipos transmisores necesariamente debemos implementar filtros que mitiguen estas espurias. A continuación un primer intento en la construcción de filtros pasa bajos para transmisores en la banda de 40 y 80 metros (HF).
Vamos a nuestro primer intento de filtro para las bandas de 80 y 40 metros. Simulaciones en RFSIM.
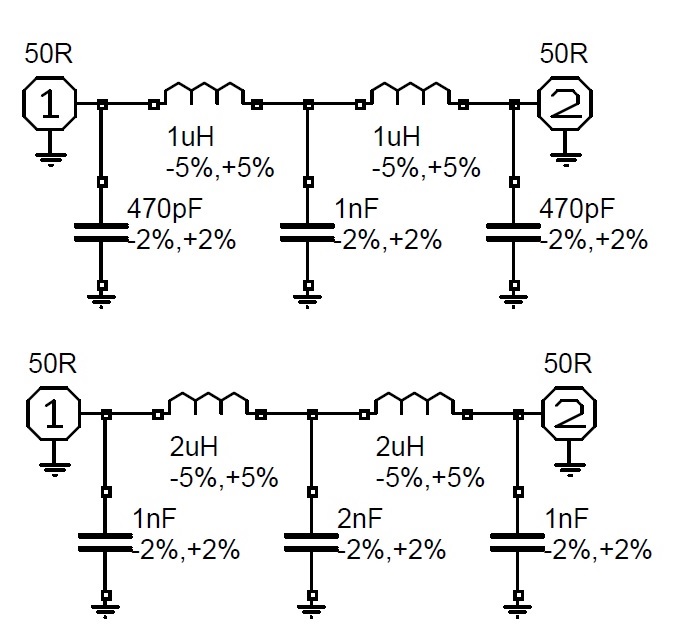
El diseño para 40 metros está basado en el filtro de 5 polos que utiliza el kit ILER 40. Para 80 metros, se mantuvieron las mismas reactancias capacitivas en inductivas del filtro anterior, pero calculadas para esta banda, resultando en la multiplicación en un factor x2 de capacitores e inductores (los condensadores de 940pF los consideré de 1nF) . Utilizaremos la herramienta RFSIM para simular el comportamiento de estos circuitos.
Figura 1. Filtros a simular en RFSIM.
En las gráficas siguientes tenemos escala lineal en el eje X, correspondiente al eje de la frecuencia, mostrando el rango comprendido entre 1 kHz y 30 MHz. En el eje Y, tenemos escala logarítmica (dB), donde en rojo apreciamos el parámetro de transmisión S12 (o S21 – es simétrico, pues dá lo mismo cuál puerto es entrada o salida en estos filtros pasivos, con igual impedancia característica en ambos puertos -) y en azul el parámetro de reflexión S11 (o S22, por la misma razón recién mencionada). Estos parámetros dependen de la frecuencia y corresponden a la proporción (expresada en dB) de la potencia que pasa a través del filtro (S12) o la que se refleja (S11), respecto de la potencia total inyectada al filtro.
Figura 2. Respuesta simulada del filtro para 40 metros. Click para aumentar imagen.
De acuerdo a la figura 2, El filtro para 40 metros tiene respuesta prácticamente plana para el rango de frecuencias comprendido entre 6 MHz y 8.5 MHz, con atenuación de transmisión S12 inferior a 0.25 dB y parámetro de reflexión inferior a -15 dB. La frecuencia de corte (-3 dB) está a 9.9 MHz. A 14 MHz tenemos atenuación del orden de 25 dB, a 21 MHz de 44 dB y a 28 MHz de 58 dB. Bastante bien.
Figura 3. Respuesta simulada del filtro para 80 metros. Click para aumentar imagen.
Por otro lado, el filtro para 80 metros tiene respuesta prácticamente plana para el rango de frecuencias comprendido entre 3 MHz y 4.2 MHz, con atenuación de transmisión S12 inferior a 0.05 dB y parámetro de reflexión inferior a -20 dB. La frecuencia de corte (-3 dB) está a 5 MHz. A 7 MHz tenemos atenuación del orden de 25 dB, a 10.5 MHz de 44 dB y a 14.5 MHz de 60 dB. Muy bien.
Y ahora, a construir.
Entre mis componentes tengo algunos toroides tipo T130-2, adecuados para trabajar hasta 10 MHz. Con estos toroides podemos construir filtros que soporten 500W P.E.P. sin problemas. También encontré condensadores cerámicos de alto voltaje (1 kV) de diversos valores. Si bien este tipo de condensadores no es ideal para aplicaciones en RF, por presentar pérdidas no despreciables en dieléctrico al operar en el rango de las radiofrecuencias y por la alta dependencia de su capacitancia con la temperatura, los voy a utilizar de todas maneras a modo de ensayo. La idea es siempre aprovechar lo que hay a mano para experimentar.
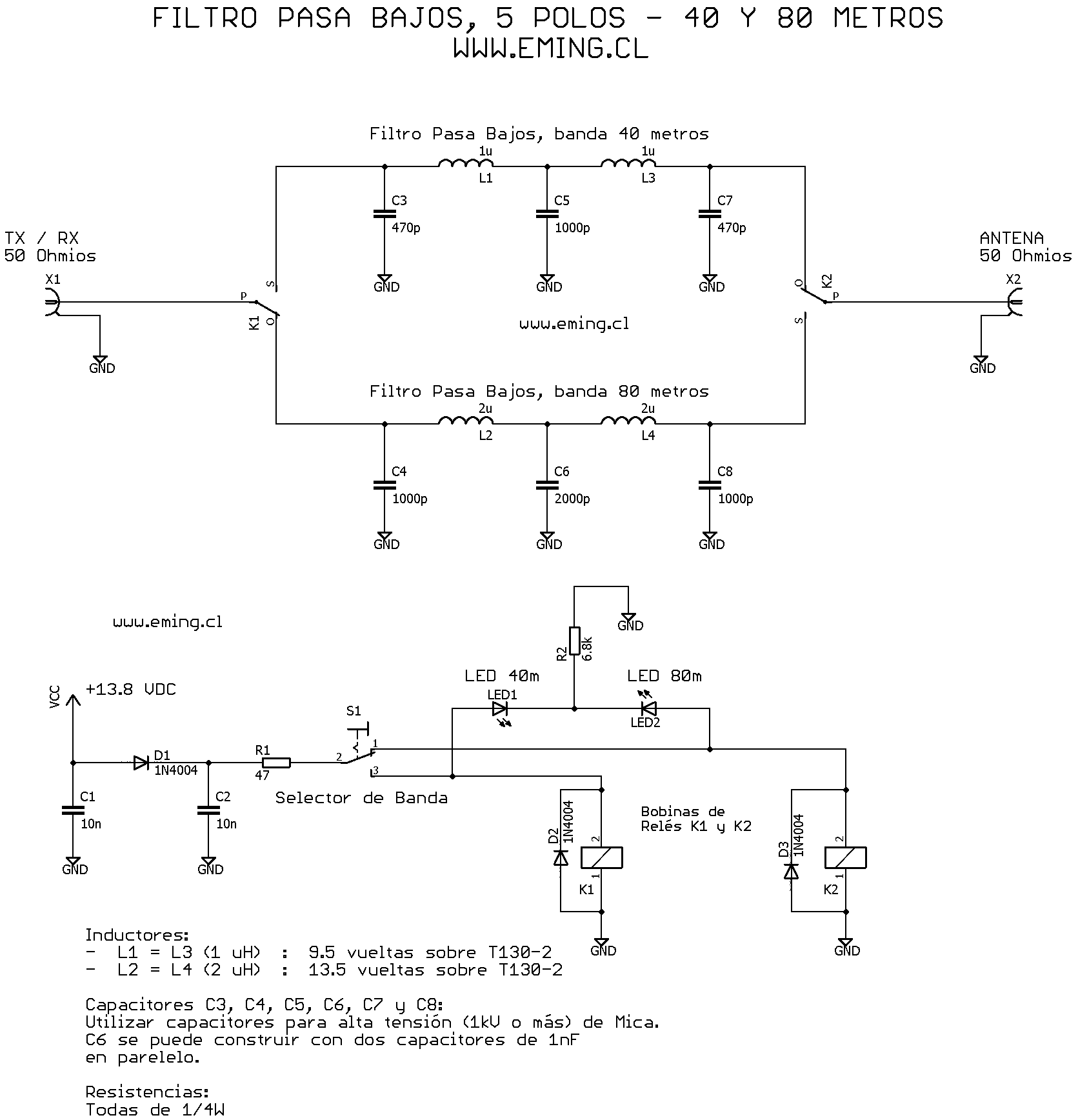
El circuito se muestra a en la figura 4.
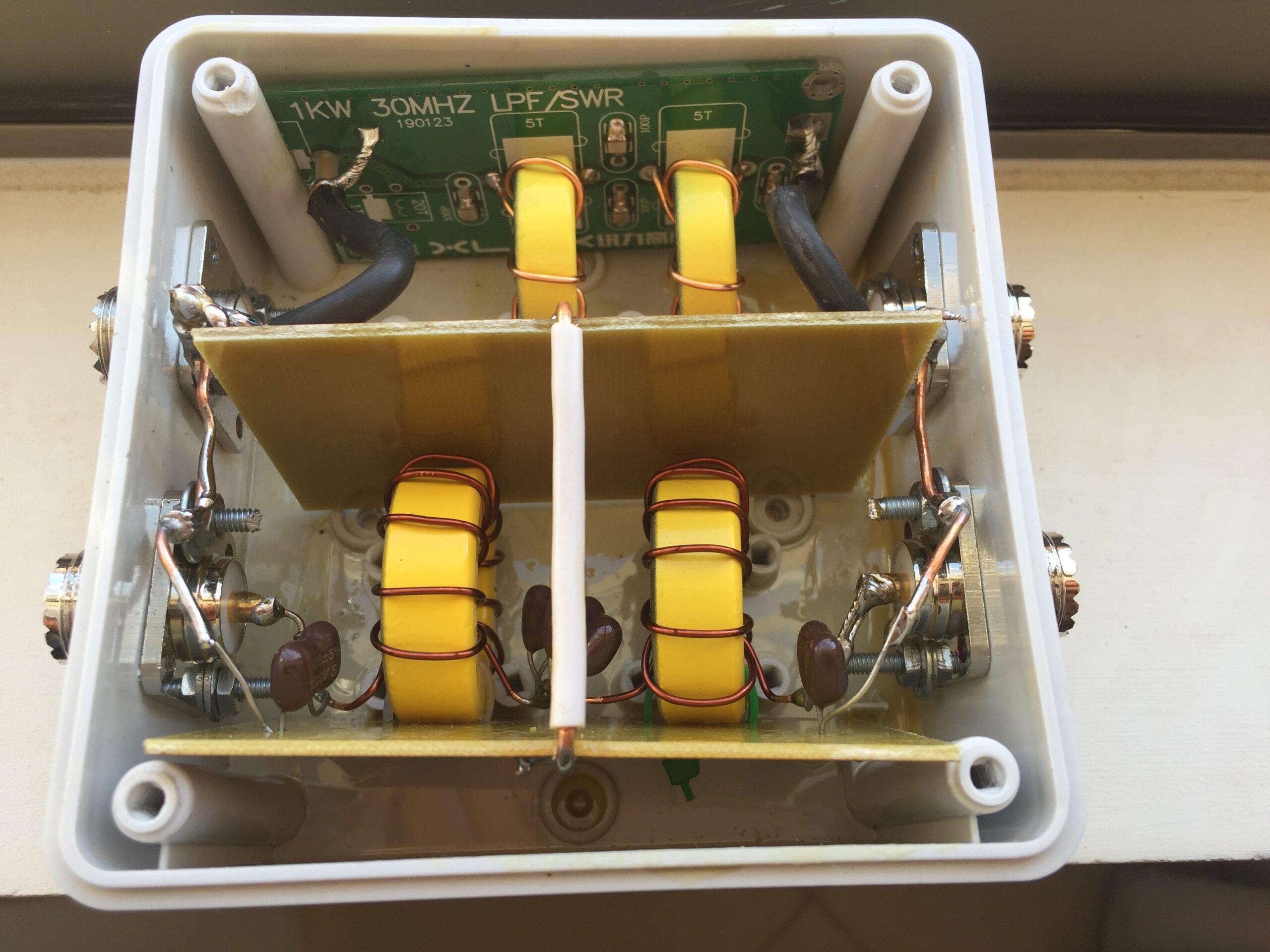
Figura 4. Circuito con filtro pasa bajos para bandas de 80 y 40 metros, de 5 polos.
El filtro requiere alimentación 13.8 VDC, y consume del orden de 30 mA, dados por la corriente del bobinado del relé activo y LED indicador de banda.
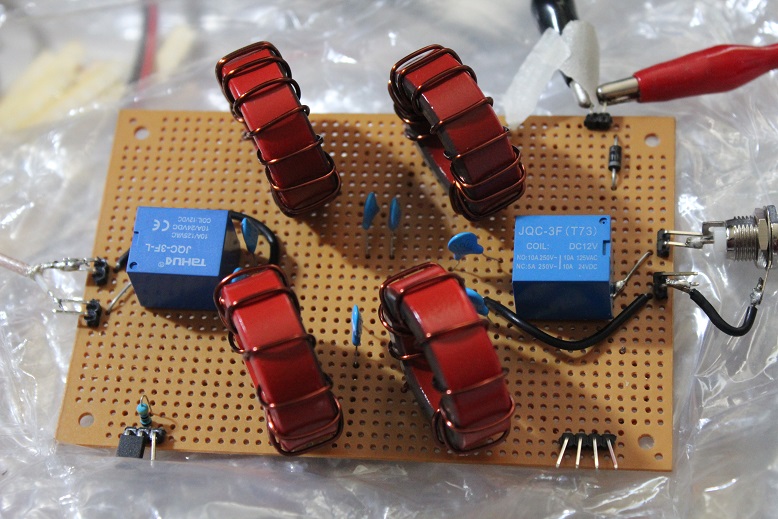
En la foto 1 vemos una vista general de esta primera versión de filtro pasa bajos bi-banda, para 80 y 40 metros. Está armado sobre un PCB pre-perforado, dejando las mayor parte de las conexiones a través de conductores soldados, lo más cortos posible. Si bien no es la mejor forma de construir PCBs de RF (recordemos que en RF se hacen relevantes las capacitancias e inductancias parásitas, afectando el desempeño del circuito), me he tomado la libertad de hacerlo así pues está pensado en operar sólo en las «bandas bajas» de HF, como lo son 40 y 80 metros. El frecuencias más altas, el efecto de estas capacitancias e inductancias parásitas se hace muy relevante.
Foto 1. Filtro construido para mediciones.
Los inductores (bobinas) se construyen de acuerdo a las indicaciones del fabricante de los toroides (ver toroids.info), donde tenemos la siguiente relación:
Ecuación 1. Cálculo de inductancia de bobinado sobre toroide T130-2.
De la ecuación 1 podemos obtener que para un L = 1 uH, N = 9.5 vueltas. En la foto 2 vemos esta bobina lista.
Foto 2. Inductor 1uH sobre toroide T130-2, utilizado para filtro pasa bajos banda de 40 metros.
Asimismo, para la L = 2 uH, N = 13.5 vueltas. Podemos apreciar esta bobina en la foto 3.
Foto 3. Inductor 2uH sobre toroide T130-2, utilizado para filtro pasa bajos banda de 80 metros.
Estos enrollados fueron construidos con hilo esmaltado 18 AWG.
Los resultados.
Llegó la hora de la verdad… pongamos el circuito de la foto 1 al analizador de espectro con generador de tracking. En las figuras 5 y 6 tenemos los resultados de ambos filtros.
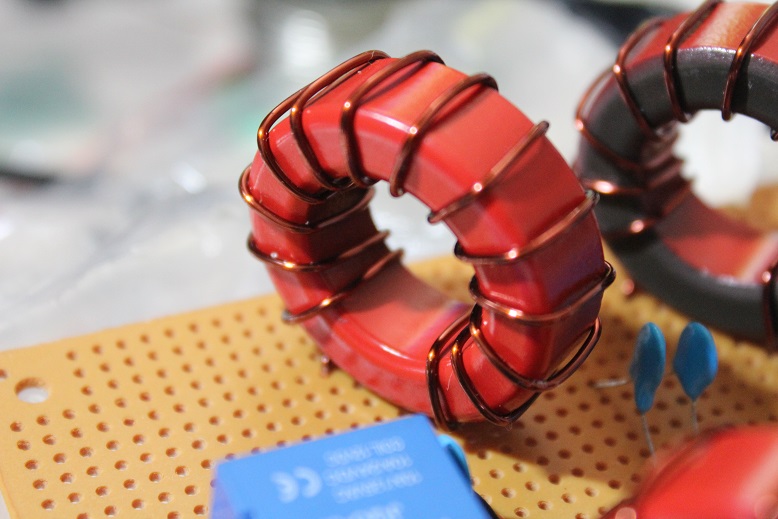
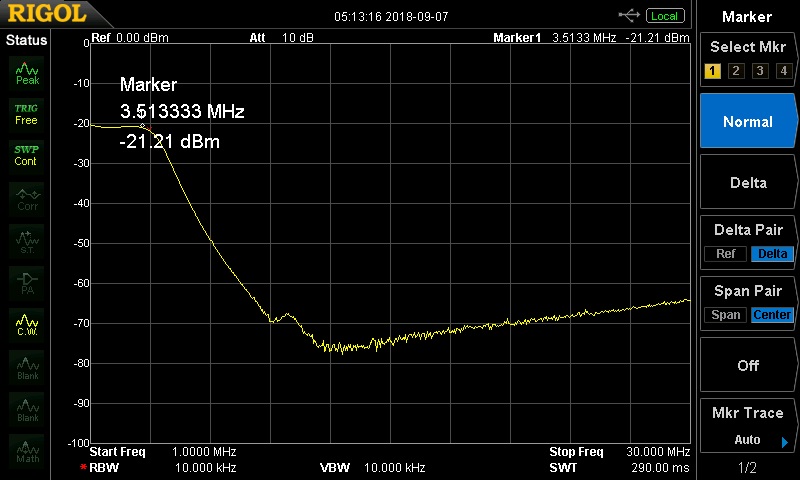
Figura 5. Respuesta de filtro para banda de 40 metros.
Para 40 metros, vemos que dentro del rango 6.990 kHz y 7.330 kHz el rizado es inferior a 1 dB, pero sin embargo observamos atenuación entre 2 y 3 dB. Esto puede deberse al tipo de condensadores utilizados y al rango de tolerancia de las componentes (especialmente los inductores, que posiblemente son de más de 1 uH). A 14.3 MHz la atenuación es del orden de 25 dB, a 21 MHz de más de 45 dB, mientras que a 28 MHz de 50 dB.
Figura 6. Respuesta de filtro para banda de 80 metros.
En el caso del filtro para 80 metros, vemos que dentro del rango 3.500 kHz y 4 MHz el rizado es inferior a 1 dB pero, al igual que en el caso anterior, observamos atenuación entre 2 y 3 dB. A 7 MHz la atenuación es del orden de 30 dB, a 10.5 MHz de más de 45 dB, mientras que a 14.5 MHz de 55 dB.
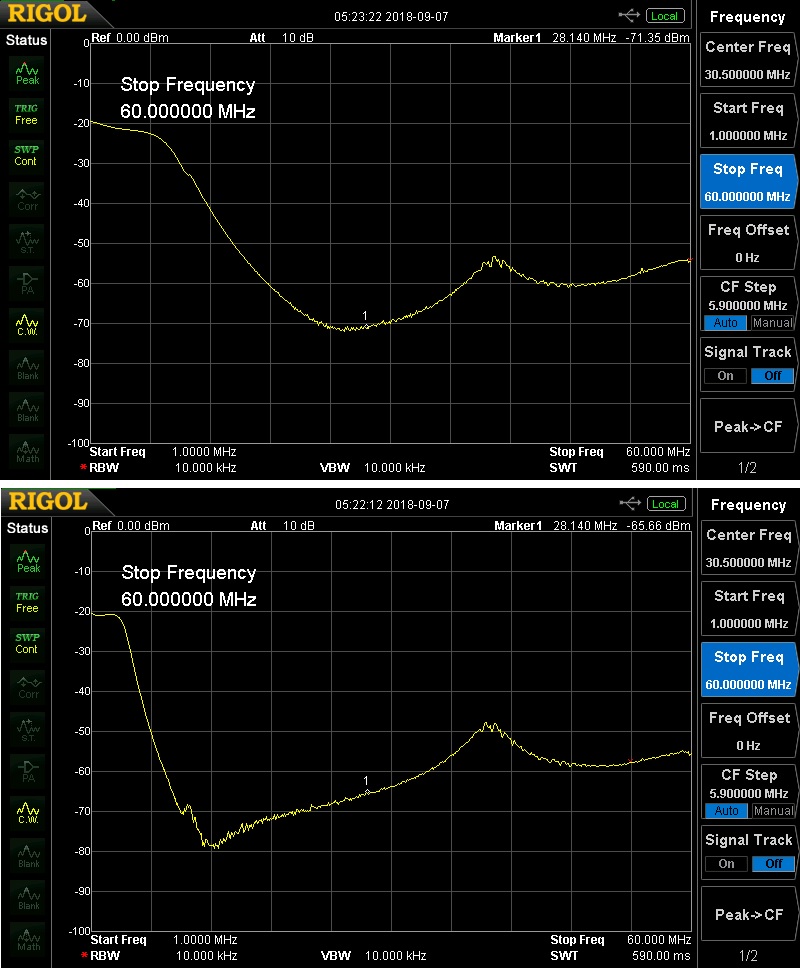
A medida que incrementamos la frecuencia, observamos que la atenuación tiende a ser menor (ver figura 7). Esto se debe a que los acoplamientos capacitivos se hacen más significativos, predominando capacitancias en serie. Para reducir este efecto, será conveniente apantallar cada etapa del filtro (por ejemplo, poniendo placas de aluminio conectadas a tierra GND entre los inductores toroidales).
Figura 7. Respuesta observada en el rango 1 kHz a 60 MHz.
A lo largo del rango de frecuencias analizado, vemos máximos y mínimos de atenuación, dejando en evidencia ciertas resonancias en el circuito.
Conclusión
La respuesta en frecuencia del circuito físico es diferente a la simulada, resultado esperable porque las componentes reales tienen valores de inductancias y capacitancias diferentes a las ideales. Por otro lado, las inductancias tienen capacitancias parásitas relevantes a la frecuencia de operación.
Otro aspecto importante es la alta atenuación del filtro dentro de las bandas de interés. Se han medido entre 2 dB y 3 dB. En otra oportunidad, quiero probar el filtro con potencia, para ver si esta atenuación se debe a los capacitores cerámicos (debieran ser de mica). Operando el filtro con unos 300W en CW, y tomando imágenes térmicas podremos descubrir dónde está la pérdida de potencia.
En resumen, está bastante bueno el filtro, pero si lo quieres construir te recomiendo utilizar capacitores de mica y apantallar los toroides entre sí.
Si lo construyes, agradecería me comentes cómo te ha funcionado.
Saludos
Emerson Sebastián
ACTUALIZACIÓN 22/02/2021
Por restriciones de espacio, en casa puedo operar desde la banda de 40 metros hacia arriba en forma eficiente, lo que me motiva a construir filtros para 40 y 10 metros. Para 10 metros hay un kit relativamente barato en Ebay, el que decidí adquirir, mientras que para 40 metros decidí construir un filtro con capacitores mica-plata y toroides T130-6. Los resultados de mi diseño son satisfactorios, mientras que el filtro adquirido queda un poco al debe.
Figura 8. LPF para 40 y 10 metros.
En cuanto disponga de tiempo para ello, publicaré mis resultados.
En este artículo escribo sobre lo que es una verdadera maravilla tecnológica, gracias a la cual hoy podemos hacer sintetizadores de señal de gran versatilidad, precisión y estabilidad con hardware reducido. Es el llamado Sintetizador Digital Directo (o Direct Digital Synthesizer DDS).
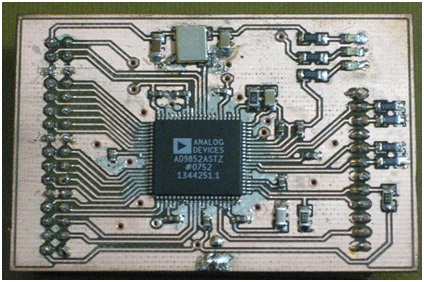
Foto 1. Mi primera tarjeta DDS. Elaboré este header para el chip AD9852 de Analog Devices (año 2009).
Esta modalidad de síntesis de señales poco a poco ha ido reemplazando a los clásicos circuitos PLL (lazo enclavado en fase), debido a su mayor capacidad de resolución en frecuencia y fase (y también de amplitud en algunos modelos de DDS). Gracias a estas cualidades es posible construir en forma más sencilla transmisores de gran estabilidad, receptores de precisión para instrumentación y moduladores para señales complejas como QAM, entre otras cosas.
Analizaremos brevemente aspectos teóricos de su funcionamiento y finalmente veremos cómo construir uno para nuestro uso en experimentación. Al final de esta página podrás encontrar los links de descarga con toda la información necesaria para que hagas tu propio oscilador local DDS, basado en el módulo AD9850 @ 125 MHZ..
Ahora bien… ¿Cómo funciona un sintetizador digital directo? veamos un poco de teoría…
Oscilador Numéricamente Controlado (NCO)
El corazón del proceso de síntesis digital directa es el llamado Oscilador Numérico Controlado (NCO por sus siglas en inglés). A continuación describo brevemente como opera:
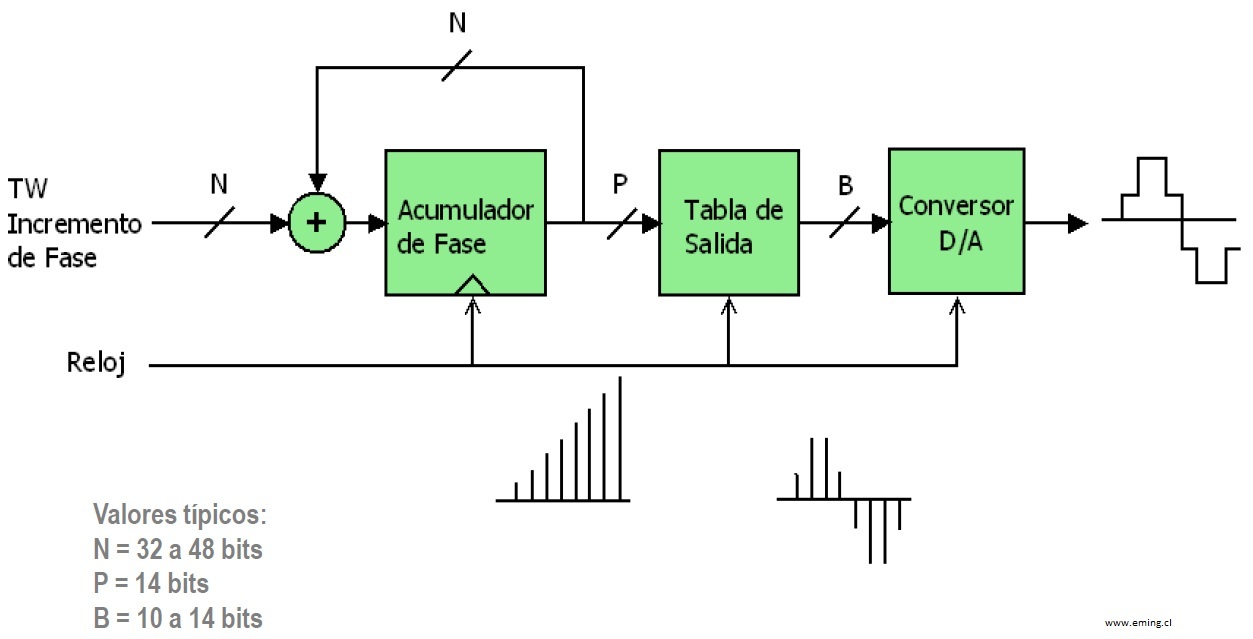
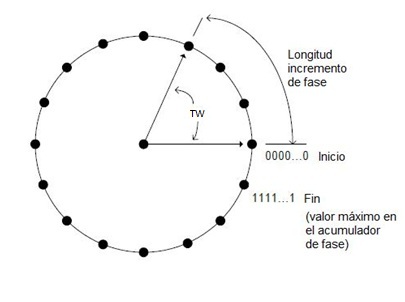
Vamos a la figura 1. Un registro (número) de N bits, llamado acumulador de fase, con cada ciclo de reloj se incrementa en un cierto valor que denominaremos incremento de fase TW. El acumulador de fase puede tener un valor – expresado en números decimales – entre 0 y 2^N – 1 (2 elevado a N, menos 1). Este incremento periódico del valor numérico contenido en el acumulador de fase hará que luego de determinada cantidad de ciclos de reloj alcance su valor máximo 2^N – 1. Mientras mayor sea el valor de TW, se requerirán menos ciclos de reloj para llegar al valor máximo del acumulador de fase, el cual una vez alcanzado hace que el valor del acumulador de fase vuelva a reiniciar a la siguiente suma de TW (siguiente ciclo de reloj). Podemos hacer la analogía entre el acumulador de fase y el ángulo de un fasor que gira a incrementos constantes TW (ver figura 2), donde 0° es el valor numérico 0 y cuyos 360° equivalen a un valor 2^N (ver figura 2).
Figura 1. Esquema básico de un oscilador numéricamente controlado (NCO), bloque fundamental de un DDS.
Figura 2. Analogía entre el contenido del acumulador de fase de N bits (2^N puntos completan la circunferencia), y un fasor que gira a pasos de longitud TW.
Si en el bloque denominado tabla de salida (figura 1) a cada valor contenido en el acumulador de fase asociamos un determinado valor de amplitud, por ejemplo una sinusoide, tenemos un oscilador digital sinusoidal. En la práctica, a cada valor contenido en el acumulador de fase se le considera una dirección de memoria apuntada hacia los datos contenidos en la tabla de salida, y son estos datos los que contienen la amplitud de correspondería al seno (o coseno) del ángulo equivalente al número contenido en el acumulador de fase. Como los valores típicos de N van desde los 32 hasta 48 bits, si asociáramos a cada valor posible en el acumulador de fase una determinada amplitud, ¡ocuparíamos excesiva memoria!, por lo cual en la práctica se consideran sólo los P bits más significativos (usualmente 14 bits en DDS comerciales).
El valor de TW no necesariamente será un divisor exacto de 2^N, por lo cual al completar un ciclo (giro completo del fasor mostrado en la figura 2) podría no empezar en valor 0 el siguiente ciclo, sino en una fracción de TW. En esencia, cuando con la siguiente adición de TW al acumulador de fase sobrepasa la capacidad numérica de este, simplemente se ignora el bit de acarreo (overflow en inglés) y el ciclo se inicia nuevamente desde un valor numérico correspondiente a la fracción de TW que se puede expresar en N bits, contenida en el acumulador de fase.
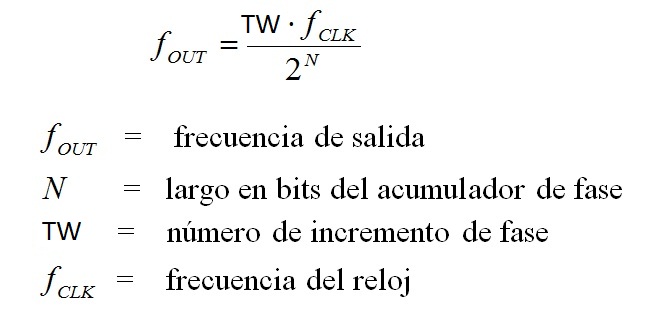
Según sea el valor contenido en el acumulador de fase, en cada ciclo de reloj se envía al conversor digital – analógico el valor correspondiente de la tabla de salida, obteniendo a la salida de este una sinusoide cuya frecuencia es función de TW (valor que controlamos externamente), la frecuencia de reloj (fija, definida por el hardware) y N (capacidad del acumulador de fase, también definido por el hardware). La ecuación que determina la frecuencia de salida es la siguiente:
Ecuación 1. Definición de la frecuencia sintetizada en un DDS. Frecuencia máxima utilizable está definida por el límite de Nyquist. Sin embargo, en la práctica, se puede considerar un valor razonable el 30% de la frecuencia del reloj.
Notar que para obtener frecuencias múltiplos exactos de 1 Hz, es necesario que la frecuencia de reloj sea una potencia de 2 – suponiendo exacta la frecuencia de reloj -. Sin embargo, para DDS con un acumulador de fase de 32 bits o más, la cantidad de frecuencias posibles es tan elevada que la resolución en frecuencia es muy fina (paso entre frecuencias posibles a generar por el DDS es de orden de fracción de Hz), con lo cual aunque utilicemos relojes de frecuencias comunes (125 MHz, por ejemplo) podemos aproximarnos a la frecuencia que se desea generar con error inferior a 1 Hz, más que suficiente para cualquier aplicación práctica.
Consideraciones respecto del espectro de salida de un DDS
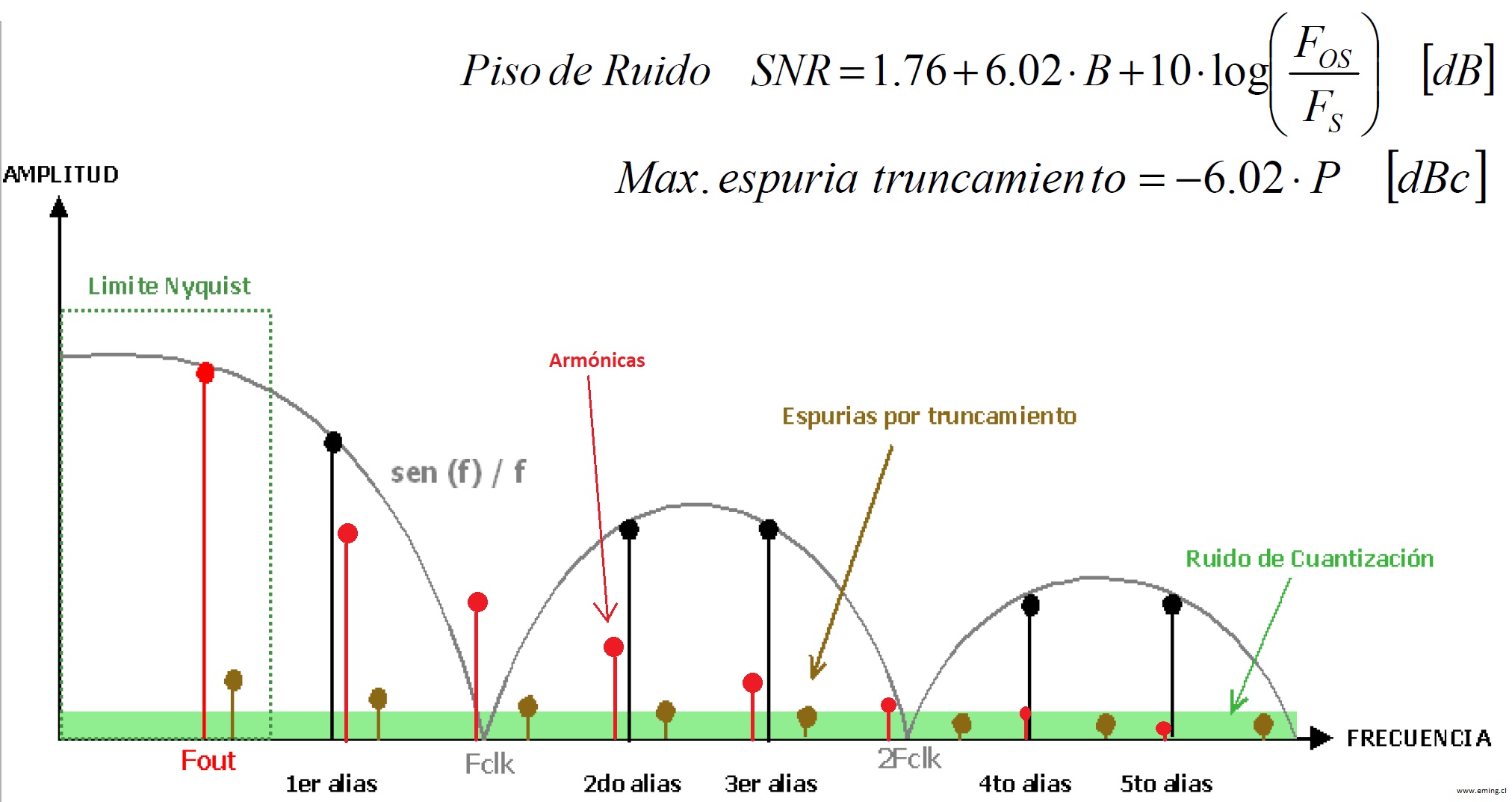
En la figura 3 tenemos un dibujo simplificado donde aparecen las principales componentes espurias que se generan en un DDS.
Figura 3. Dibujo simplificado donde podemos ver las principales frecuencias espurias generadas por el DDS en operación estática. Piso de ruido dado por el error de cuantización, componentes por aliasing, frecuencias armónicas y espurias por truncamiento del número de fase.
A continuación una breve descripción de cada una de ellas:
Frecuencias alias por digitalización de la señal. Por efecto alias, se observan componentes cuyas frecuencias están dadas por las sumas y restas de múltiplos de la frecuencia de muestreo (reloj fclk) y la fundamental (frecuencia de salida fout). El principal objetivo del filtro implementado en el módulo AD9850 es filtrar estas frecuencias imágenes.
Ruido de cuantización.El proceso de conversión digital a analógica, donde se obtiene un voltaje sinusoide, al tratarse de una señal digital tenemos que existe una diferencia entre el valor entregado por el conversor y aquel que debería tener la sinusoide. Este error de cuantización está determinado por la resolución del conversor D/A (típicamente entre 10 y 14 bits para DDS comerciales). Es razonable pensar que la potencia de ruido generada por este error de cuantización se distribuye uniformemente en toda la banda definida por el límite de Nyquist (es decir, desde 0 Hz hasta la mitad de la frecuencia de reloj Fclk/2), por lo cual es posible reducir el piso de ruido si se incrementa la frecuencia de reloj. En la figura 3 se representa el piso de ruido y la relación señal a ruido determinada por el error de cuantización, suponiendo un conversor D/A de B bits y Fs = 2*fout, donde Fos es la frecuencia de sobremuestreo (Fos > Fs), es decir, frecuencia a la cual se puede incrementar el reloj del DDS. En la práctica, por ejemplo, si Fs = fclk = 80MHz, teóricamente el valor máximo de la frecuencia de salida es fout = 40MHz (definido por límite de Nyquist), pero podemos mejorar la SNR teórica que define la resolución del conversor D/A a través del uso de una frecuencia de reloj más elevada, por ejemplo, fclk = 125MHz, pues distribuiremos la potencia de ruido de cuantización en un rango mayor de frecuencias (desde 0Hz hasta 62.5MHz). Otra forma de verlo es que, para una frecuencia de reloj fclk dada, la SNR definida por el ruido de cuantización será mayor cuando la frecuencia sintetizada fout sea mucho menor que el límite de Nyquist (fclk/2). Por ello, nos convendrá utilizar DDS con frecuencia de reloj elevada, aunque las frecuencias que queramos sintetizar sean mucho menores que la mitad de la frecuencia de reloj.
Espurias por truncamiento del número de fase. Como indiqué en un párrafo anterior, por motivos prácticos la tabla de salida del NCO no puede contener tantos registros como valores posibles tenga el acumulador de fase (piensen que para un acumulador de N = 32 bits necesitamos varios GB, y para N = 48 bits son centenares de TB!), y por esto existe un error en la conversión entre el ángulo de salida de la sinusoide (que considera sólo los P bits más significativos) y el ángulo contenido en el acumulador de fase. Este error tiene periodicidades, las que definen frecuencias espurias. En términos prácticos, aquella componente espuria de mayor amplitud estará a -6.02P dB de la frecuencia fundamental (fout), con típicamente P = 14 bits, y el número de incremento de fase equivalente de la mayor espuria por esta causa estará dado por el máximo común divisor entre el número de incremento de fase TW y 2^(N-P-1). Si el número de incremento de fase satisface que el máximo común divisor entre TW y 2^(A-P) es 2^(A-P), entonces no hay espurias por truncamiento de fase, ya que el error de ángulo sería constante en todo el ciclo (no hay periodicidad, por lo tanto no hay frecuencias asociadas).
No linealidades del conversor digital – análogo.Es imposible construir un conversor ideal, por lo que siempre – al igual que en los amplificadores – existirán componentes armónicas de la fundamental causadas por no linealidades en el proceso de conversión. En ciertas oportunidades pueden ser beneficiosas, pues las frecuencias armónicas son múltiplos de la frecuencia de salida, las que pueden ser utilizadas por la electrónica. Un buen ejemplo de aquello es la Application Note AN-543, donde se utilizan las componentes armónicas provenientes de un AD9850 (con frecuencia de reloj de 125 MHz, por lo tanto, con una frecuencia de salida teórica máxima de 62.5 MHz -límite de Nyquist-) para implementar un transmisor para radiodifusión sonora modulado digitalmente (que opera entre 88 y 108 MHz).
Jitter.A variaciones instantáneas de la frecuencia se le denomina «jitter», y en un DDS puede ser causado por el jitter propio del generador de reloj (por ello es importante utilizar aquellos que sean muy estables), por circuitos PLL de reloj (típicamente los DDS con frecuencias de reloj muy elevadas suelen utilizar circuitos PLL para multiplicar la frecuencia de reloj de entrada, generando jitter y ruido de fase). También se puede ocasionar por acoplamiento entre las pistas del circuito de reloj y fuentes externas de RF, o bien por ruido térmico.
En fin… como todo circuito electrónico, especialmente si conjuga señales analógicas y digitales, tenemos diversas causas que pueden generar componentes espurias. Lo ideal es asegurarse de construir un hardware debidamente protegido de las EMI, y tener una señal de salida que aproveche toda la escala del conversor D/A con una frecuencia muy inferior al límite de Nyquist (fclk/2).
Ahora vamos a encender el cautín… construyamos nuestro propio oscilador local con un sintetizador digital directo, basado en AD9850 de Analog Devices.
Este proyecto está basado en el módulo DDS AD9850 con reloj de 125 MHz, disponible por Ebay y Amazon. Puedes trabajar con instrumentos básicos (multímetro), una radio MF/HF y/o un SDR (como el famoso RTL) para «escuchar» las frecuencias que sintetizas. Aquí muestro mediciones con instrumentos debidamente calibrados (excepto el frecuencímetro del osciloscopio… no le crean… lee bien hasta 3 MHz… el analizador de espectro es mucho más confiable) con el objetivo que puedas visualizar los resultados que obtendrás.
Bueno… vamos al circuito:
Figura 4. Esquemático con circuito para implementar oscilador local basado en el módulo DDS AD9850 @ 125MHz. Utiliza un microcontrolador PIC16F877A con un cristal de 4MHz y display LCD de 16×2 caracteres.
La tarjeta basada en PIC tiene muchos años… está reciclada de un proyecto que desarrollé en tiempos remotos. Si bien los microcontroladores PIC de la serie 16 son bastante «vintage» a estas alturas del partido, de vez en cuando los utilizo porque son muy confiables. Unos colegas me contaron que incluso algunos CubeSat que andan orbitando por la ionósfera tienen microcontroladores PIC en su interior 🙂 – aunque series más modernas -.
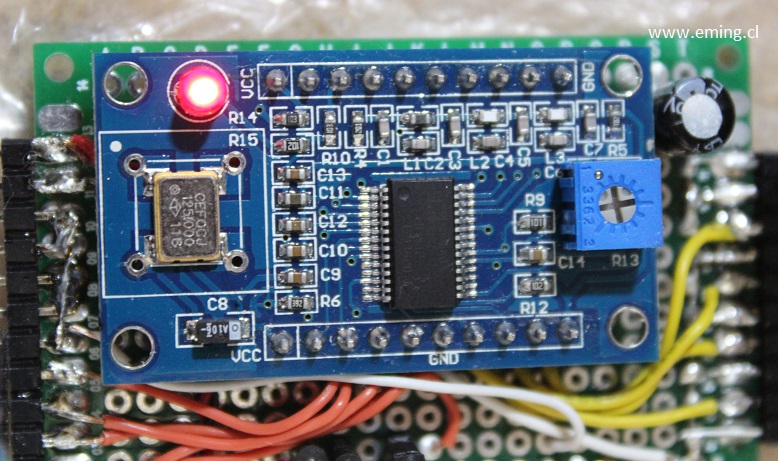
Figura 5. Módulo DDS con AD9850 y reloj de 125 MHz. Fuente: EIModule.
Figura 6. Pines del módulo AD9850. Fuente: EIModule. Los pines D0 y D1 deben conectarse a +5VDC, mientras que RESET, D2, D3, D4, D5 y D6 a GND. D7 se usará como pin DATA (es el mismo pin que se indica como DATA). Los pines que van al microcontrolador son W_CLK, FQ_UD y DATA, además de +5VDC y GND que son comunes. Las salidas son SINE OUTPUT (1 con filtro anti-alias, 2 sin filtro) y SQUARE OUTPUT (1 y 2, complementarias).
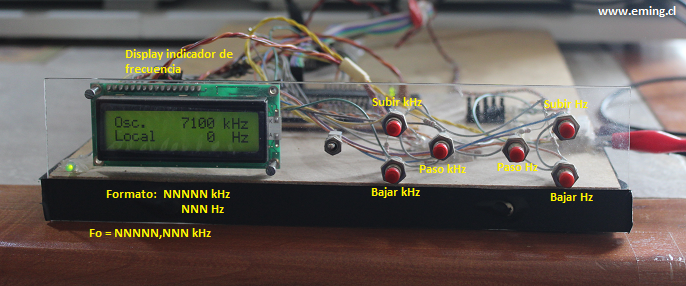
Foto 2. Podemos ver el módulo DDS AD9850 con su reloj de 125MHz, tarjeta con el PIC16F877A, regulador lineal 7805 (con disipador térmico), panel frontal con LCD 16×2, switch de encendido y botones de control.
Foto 3. Módulo AD9850. El potenciómetro permite el ajuste del voltaje de referencia que ocupa el comparador para generar señales cuadradas de 5Vpp, comparando esta referencia con la salida sinusoidal. Moviendo ese potenciómetro, puedes ajustar el ciclo de trabajo de esta señal, muy útil para excitar, por ejemplo, un amplificador de RF clase E.
Y luego de mucho ensayo – error en la programación del PIC, tenemos los resultados que se muestran a continuación:
Formas de onda:
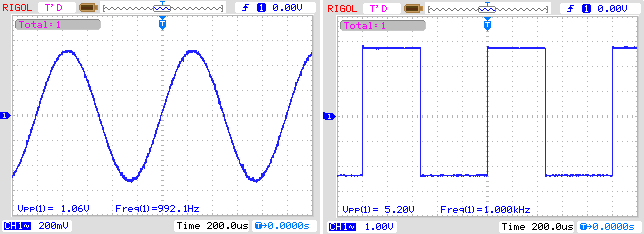
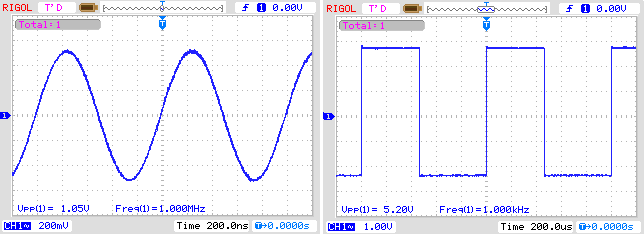
Figura 7. Formas de onda Fo = 1 kHz
Figura 8. Formas de onda a Fo = 1 MHz, onda media. La onda cuadrada está perfecta para excitar un amplificador clase E para radiodifusión sonora en amplitud modulada.
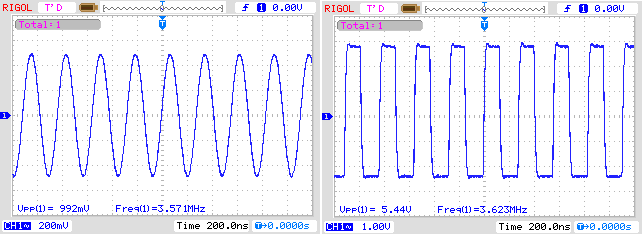
Figura 9. Formas de onda a Fo = 3.6 MHz, banda de 80 metros. Nótese la alta calidad del comparador. Insisto….. es perfecto para implementar transmisores con etapas clase E.
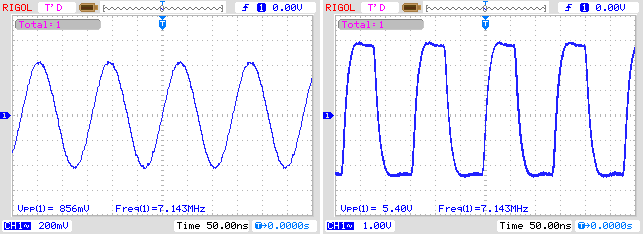
Figura 10. Formas de onda a Fo = 7.15 MHz, banda de 40 metros.
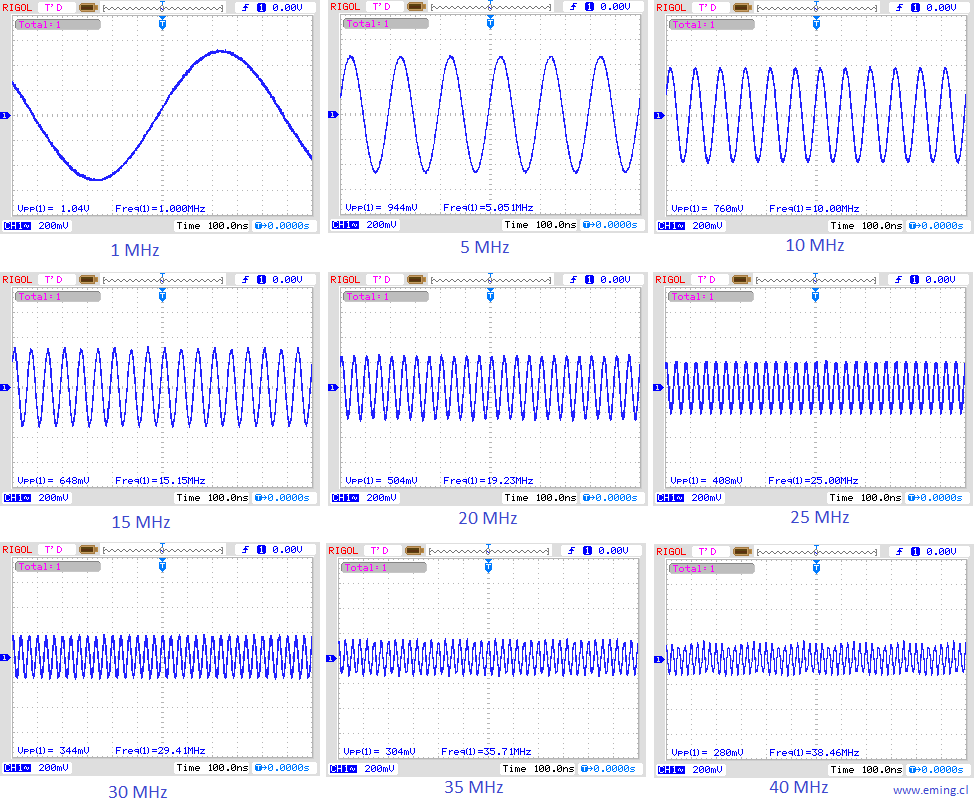
Figura 11. Forma de onda para diferentes frecuencias generadas por DDS, manteniendo escala de tiempo y amplitud constantes en todas las mediciones. Nótese como se reduce la amplitud a medida que se incrementa la frecuencia.
Espectro de salida:
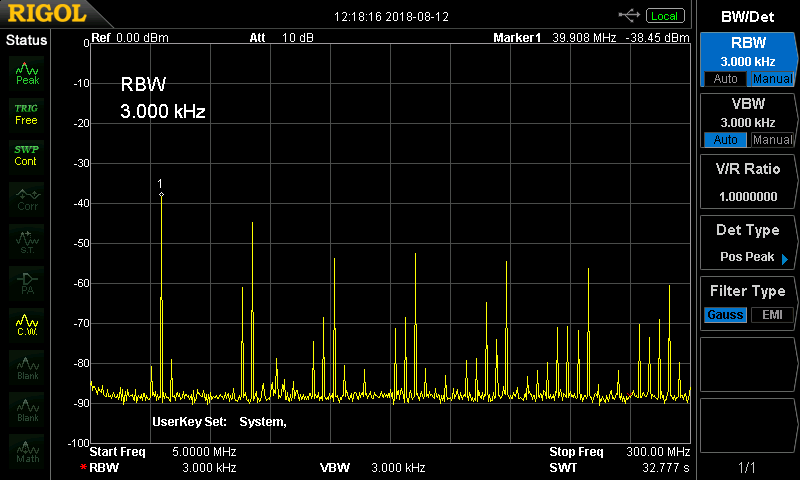
Figura 12. Espectro de salida con Fo = 40 MHz y sin filtro. Aquí podemos ver claramente frecuencias alias y también armónicas.
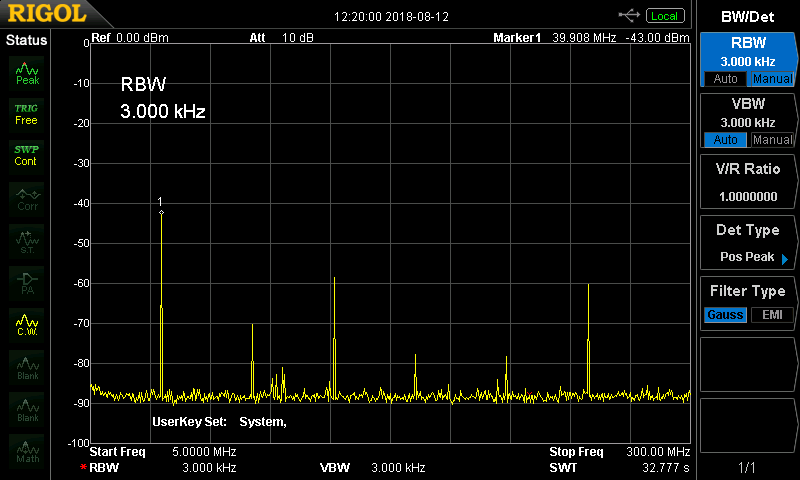
Figura 13. Espectro de salida a Fo = 40 MHz y con filtro. Observamos una importante reducción en las componentes espurias, especialmente en frecuencias generadas por efecto alias. Es poco efectivo filtrando componentes armónicas.
Figura 14. Espectro a 1 MHz. Contrario a lo que esperaba, a baja frecuencia (es sólo 1 MHz) tenemos bastantes espurias, algunas de las cuales están por sobre los -40 dBc. Supongo se debe a ruidos externos provenientes, por ejemplo, de conmutaciones digitales de aparatos del entorno o el microcontrolador, o de las potentes emisoras broadcast que hay cerca de mi casa. Es algo que voy a investigar con calma. Sin embargo, a esta frecuencia el DDS sigue siendo una excelente opción para amplificadores conmutados, como los utilizados en transmisores de alta eficiencia para radiodifusión en AM. El analizador de espectro se configuró para que marcara la frecuencia donde estuviera la intensidad peak… nótese la altísima precisión del generador DDS. ACTUALIZACIÓN: Las espurias no identificadas corresponden a portadoras de radioemisoras AM.
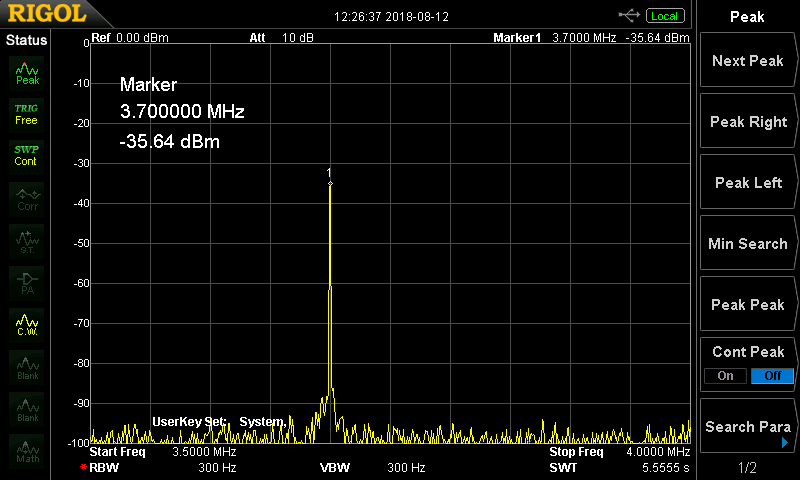
Figura 15. Espectro a 3.7 MHz. Espectro bastante limpio, por lo cual este oscilador es adecuado para utilizarse en equipos con receptores heterodinos y amplificadores lineales. Ejemplo con fundamental en la banda de 80 metros.
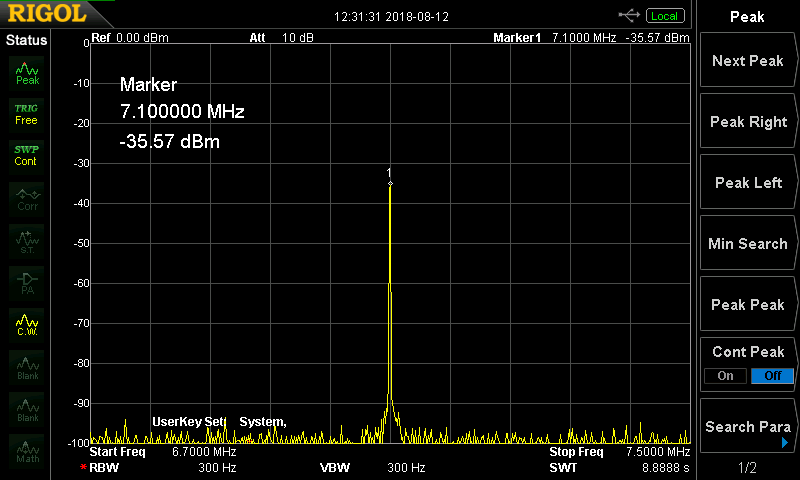
Figura 16. Espectro a 7.1 MHz. Al igual que en la figura anterior, espectro bastante limpio, por lo cual este oscilador es adecuado para utilizarse en equipos con receptores heterodinos y amplificadores lineales. Ejemplo con fundamental en la banda de 40 metros.
Mi intención es probar este sintetizador como oscilador local para un transceptor SSB en kit que tengo ensamblado, pero actualmente en formato OFV con polivaricon. Es el Iler 40. Una maravilla que necesita de un buen OFV.
Comportamiento energético y térmico…
Luego de pruebas en diferentes frecuencias, noté que cuando generaba un fout mayor a 20MHz, el DDS se calentaba a temperatura sensible al tacto. Por ello, luego de dejar apagado el dispositivo unos minutos hasta que alcanzara temperatura ambiente, lo encendí con fout = 40MHz y, al minuto de operación y temperatura ambiente de 18°C, el AD9850 alcanzó una temperatura de 41.28°C. Por ello, estimo recomendable utilizar disipador térmico. Me parece buena opción ocupar estos que hay que el comercio para los chips del Raspberry Pi (esos que tienen un autoadhesivo para pegarse al chip).
Foto 4. Imagen térmica donde se aprecia el chip DDS a 41°C.
Como observamos en la figura 11, a medida que incrementamos la frecuencia de salida, tenemos que la amplitud de la señal va disminuyendo. Algo diferente ocurre con el consumo de corriente. El circuito completo, es decir, DDS + reloj+ microcontrolador + display, operando a 1kHz consume 170mA aprox., a 1MHz se eleva a 190mA, y a 40MHz llegamos a los 210mA. Como no tenemos un incremento en la potencia de salida del DDS (de hecho, es al revés), no nos queda otra opción que la potencia adicional que consume el DDS se debe estar disipando en forma de calor. Por ello, me parece muy necesario poner aunque sea un pequeño disipador, sobre todo si la temperatura ambiente de donde se utiliza este oscilador es alta… y vamos que con el calentamiento global quizás a qué extremo vamos a llegar.
Algunas aplicaciones de esta tecnología pueden ser:
Generadores de señal con modulaciones complejas, especialmente en DDS que permiten incorporar información en la amplitud. Un buen ejercicio sería implementar hardware donde se conecte un DDS con sus pines de programación paralela a una FPGA, de modo que podamos implementar circuitos de refresco de frecuencia, fase y amplitud de alta velocidad. Un circuito como este servirá para muchas cosas. ¡interesante futuro proyecto!.
Oscilador local en transmisores y/o receptores de radio. Ideal para equipos de banda lateral única (SSB).
Sintetizadores de audiofrecuencia de alta precisión.
Instrumentos de medición, como analizadores de espectro y analizadores de antenas.
Receptores de alta precisión para radioastronomía. Gracias a la gran cantidad de canales posibles, son una buena alternativa para construir receptores heterodinos que permitan hacer análisis de corrimientos de frecuencia por efecto Doppler para velocidades relativamente bajas. Con buenos filtros de frecuencia intermedia, podemos observar desplazamientos muy pequeños, del orden de los Hz.
¿Quieres construir tu oscilador local con DDS AD9850?:
Así quedó mi primer prototipo. En los links de descarga puedes encontrar la información necesaria para replicarlo.
Foto 5. Panel frontal de mi prototipo de sintetizador DDS con AD9850. Si quieres construirlo, te sugiero seguir esta misma distribución de display y botones. Queda muy cómodo para manipular.
Para minimizar espurias en la señal de salida, recomiendo montar la electrónica en una caja metálica a tierra y protegerla de RF producida en etapas de potencia y/o aquellas con conmutaciones digitales de alta velocidad. No olvides poner disipador térmico al DDS!!.