This is my first post in English, so please excuse me if I have mistakes in redaction. The idea is to continue improving with each publication.
My goal is to develop a VFO based on DDS and PIC microntroller for the famous QRP kit Iler 40 (by Spanish amateur radio EA3GCY). Originally, this kit uses VFO with a variable capacitor (polyvaricon) to control frequency, with a range about 30kHz to 50kHz (portion of 40 meter band). EA3CGY offers a very effective DDS kit that lets use the entire band, but I decided to built my own version with more functions that are not considered on this kit. This is my homebrew Iler 40 QRP. In this post, I´ll show you schematics, give .hex program to load in microcontroller and advices to complete the transceiver.
Fig. 1 My version of Iler 40 QRP, with Control & VFO circuit based in DDS and PIC microcontroller.
My version include:
Rotary encoder knob to control frequency, in steps of 0.1kHz, 1kHz and 5kHz, selected by push button.
Up and Down push button to move frequency with accuracy.
SSB receiver clarifier. It permit to move frecuency in receiver RX mode, without affect transmission TX frequency (RX offset). With this function we can to receive stations with TX frequency shift.
3 easy access and save/erase frequencies memories (M1, M2 and M3), loaded to internal flash memory in the microcontroller.
Digital thermometer, directly in contact with power stage heat sink. In future, I´ll build a litle circuit to control a fan to dissipate heat, special to use in a large QSOs.
ATT (RX attenuation for receive local stations) and AMP (PTT to switch RX/TX external linear amplifier), both controlled by push buttons.
RSSI RX display with barrs and S-scale direct lecture.
DC supply voltmeter, with indicator Low, Good or High.
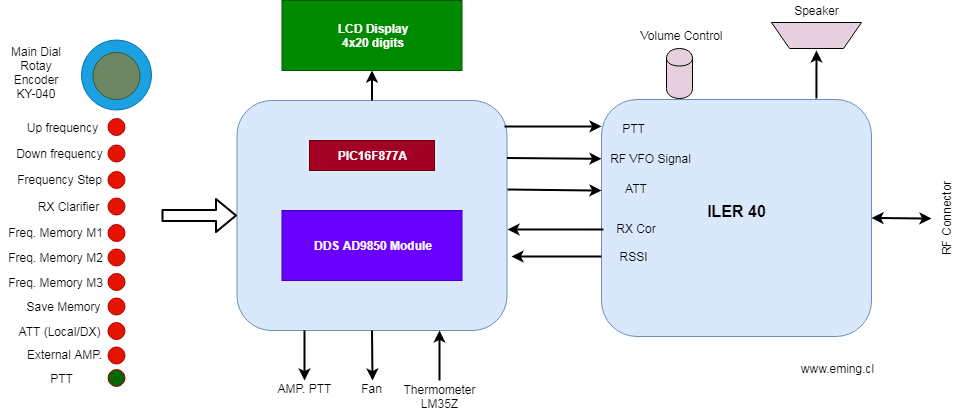
I implemented the idea showed in Fig. 2. I have my Iler 40 kit without VFO coil L6 (to eliminate oscillator stage), and a DDS module generates VFO RF signal. For more information about DDS fundamentals, you can view my post about it (only in Spanish, at yet).
This DDS VFO requires a frequency offset of 4913,52 kHz (defined by pass frequency of SSB filter in Iler 40 PCB). When I turn on my QRP, I can adjust this offset if it would be neccessary (I have to push one button to access offset configuration… but now I don´t remember wich button, jejejeje… it could be ATT button… as soon as possible I will complement this information, or you can try with all of them).
If you want to build this version QRP Iler 40, you would read this document about connection between Iler 40 and external DDS VFO.
Fig. 2 General idea of this setup. We can see the connections between boards in my Iler 40 version. Click to view in details.
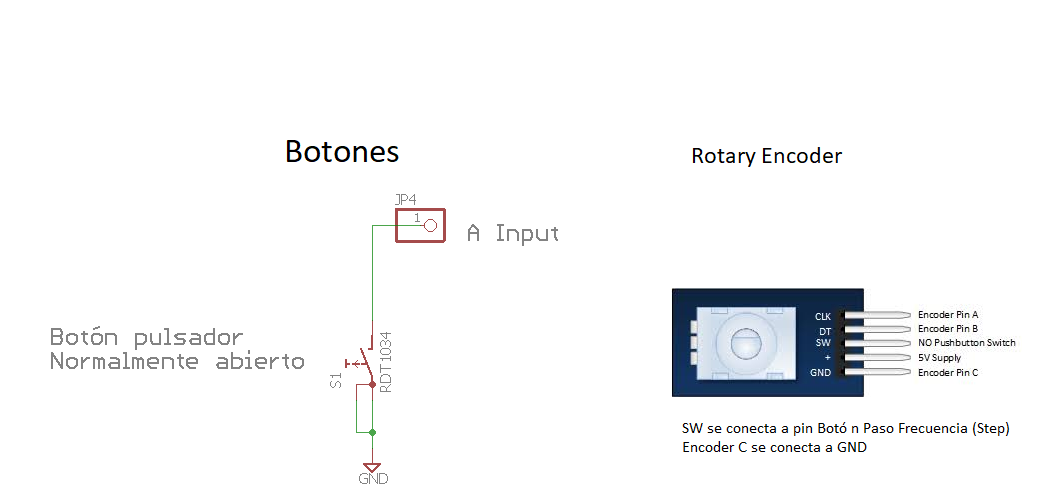
Fig. 3 shows schematic of control unit, and Fig. 4 let to know pinout used un this setup. In Fig. 5 you can see how to connect rotary encoder and push buttons.
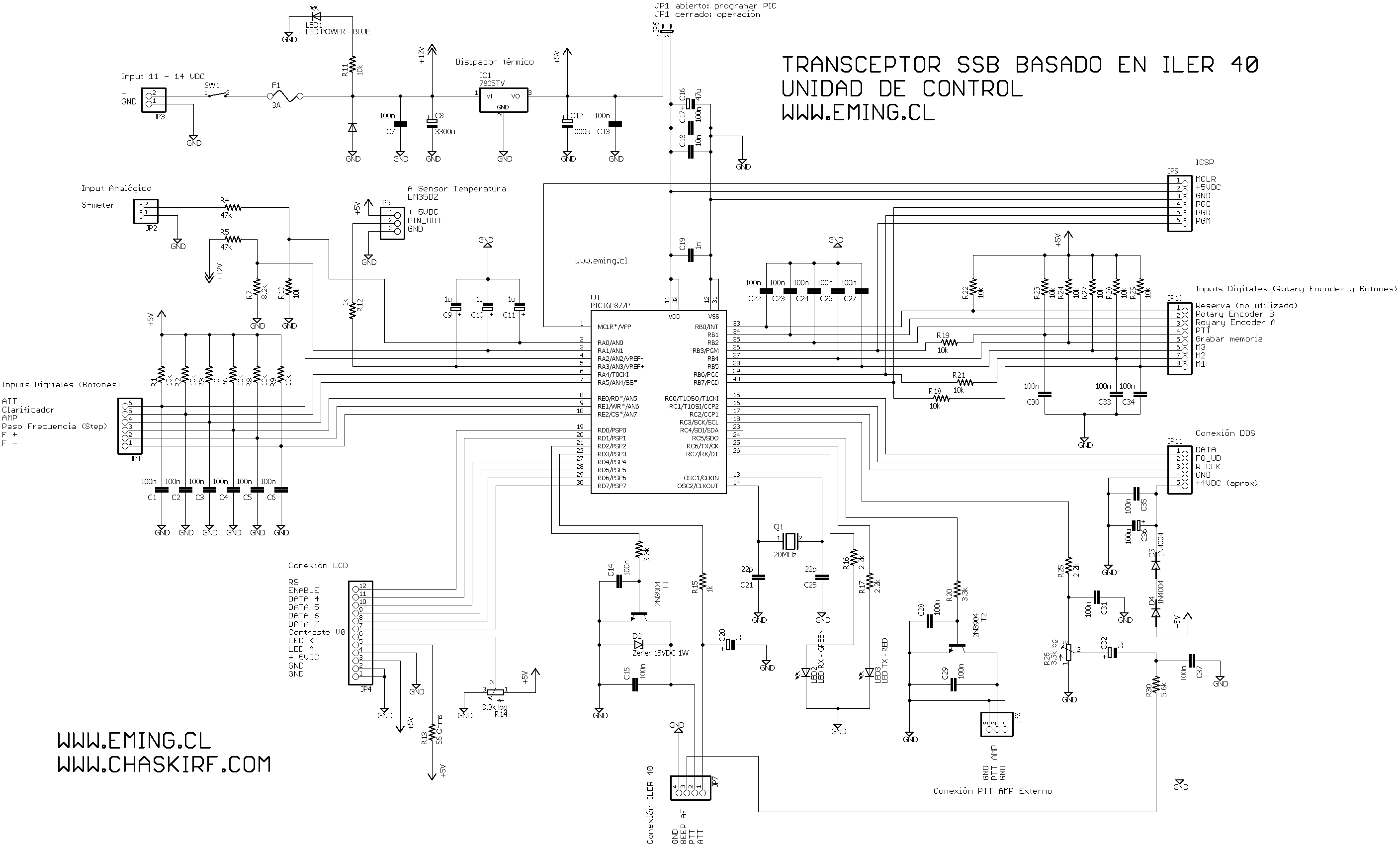
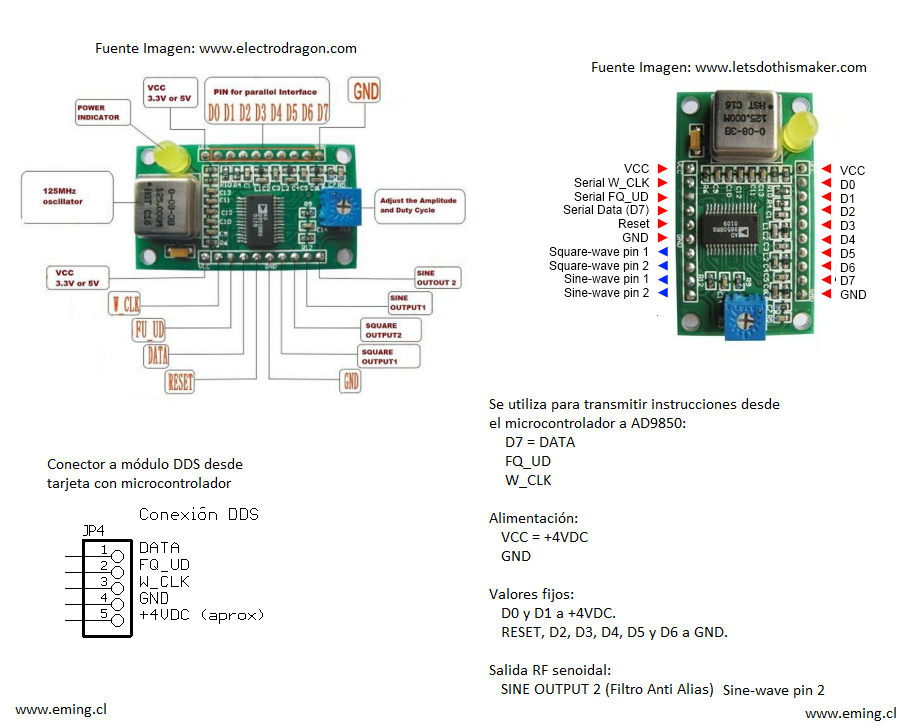
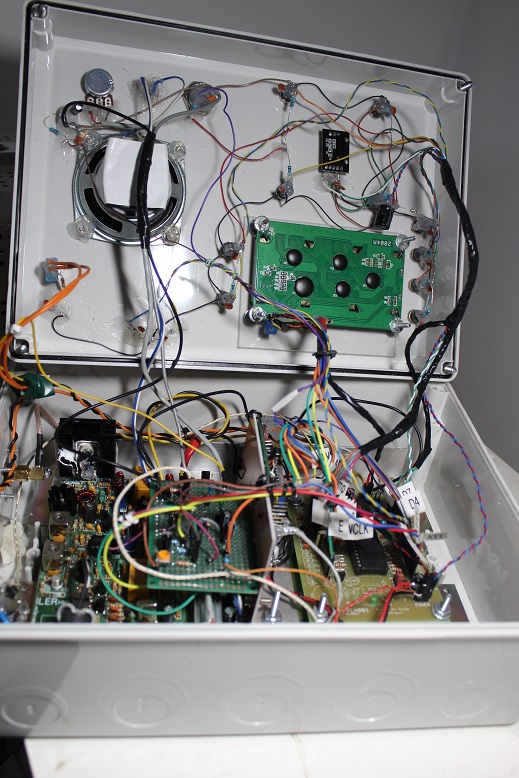
Fig. 3 Control unit schematic, based on PIC16F877A and DDS module with AD9850. Click to view in details.Fig. 4 Connections between Iler 40 and my homebrew control unit. Click to view in details.Fig. 5 Push buttons and rotary encoder connections. Click to view in details.Fig. 6 General view of muy setup.
It´s neccesary to avoid long wires with digital signals close to Iler 40 board, because RX stages are sensitive to EMI. Special care with LCD wires. Usefull idea would be to put both PCBs (Iler 40 and control unit + LCD) in different metallic boxes (Faraday´s boxes), with RF wires with ground shield (coax) and digital ones as short as possible, and far to analog wires.
To program PIC16F877A, download this .HEX file and upload to PIC microcontroller with your favorite programmer (I´m using PiCkit 3). While you are programming this target, jumper J6 must to stay open. After load software, close it.
In this video, I made a RX test, usign a End Fed Half Wave antenna put at 2 meter above the floor. When I put my phone (camera) close this transceiver, EMI produce noise.
Because my antenna is no ideal (SWR too high) in this video, I don´t used TX mode (PTT stayed open), but with dummy load and my NISSEI RS-50, I metered output power about 4W P.E.P., when supply voltage is about 12.5 [V].
I really love this QRP kit (to buy one, visit www.qrphamradiokits.com), and with my control unit & VFO is perfect for me!!.
(Homebrew SSB 40 meter band transceiver, based on ILER 40 kit and DDS VFO)
Hace ya bastante tiempo que quería probar el ILER 40, kit transceptor SSB para la banda de 40 metros desarrollado por EA3GCY, pues se trata de un circuito bastante simple con muy buenos comentarios en foros de radioafición. El diseño original utiliza un oscilador local basado en cristal de cuarzo, al que se varía levemente la frecuencia a través de condensador variable (polyvaricon). Construyendo tal cual el Iler 40 obtuve un resultado bastante bueno, destacando el bajo consumo de energía (ideal para operar con baterías) y mínimo nivel de ruido (al no tener circuitos digitales, es bastante silencioso en RX). Sin embargo, el control de la frecuencia de operación no es del todo adecuado, pues el rango de frecuencias que abarca en VFO es de no más de 40 kHz (muy inferior a los 300 kHz de toda la banda) y no cuenta con una visualización de esta. Además, quiero disponer de acceso rápido a frecuencias de uso habitual, como lo son los 7.050 kHz (Frecuencia Nacional de Encuentro), 7.085 kHz (Red Nacional de Emergencias de Chile), 7.148 kHz (Rueda de la Amistad), las que quiero almacenar en memorias fácilmente reconfigurables. Otro aspecto importante es que necesito disponer de un «Clarificador» SSB, donde pueda desplazar la frecuencia RX sin afectar la de TX, para así recibir en forma adecuada aquellas estaciones que estén desplazadas en frecuencia.
Todas estas mejoras se pueden hacer en forma rápida, sencilla y económica si utilizamos como VFO un sintetizador digital directo. En el comercio encontramos el módulo DDS basado en el chip AD9850 de Analog Devices, con un generador de reloj de 125 MHz. Como resultado, obtuve el transceptor mostrado a continuación:
Estación QRP para 40 metros, B.L.U., basada en kit Iler 40. (SSB QRP Station, 40 meter band, based on Iler 40 kit).Vista frontal del QRP
Vamos a construirlo….
Básicamente, lo que debemos construir es un sintetizador de frecuencias que cubra un rango adecuado como oscilador local. La frecuencia intermedia en TX y RX del Iler 40 es F.I. = 4.913 kHz, y a través de ensayos he observado que la frecuencia óptima de OffSet para el VFO es de 4.913,52 kHz (desviación adicional que permite óptimo ajuste al filtro para banda lateral inferior). Por lo tanto, la frecuencia de salida del VFO debe variar entre (7.000 + 4.913,52) kHz y (7.300 + 4.913,52) kHz para cubrir toda la banda de 40 metros (7.000 a 7.300 kHz). A través de la programación del microcontrolador se puede extender levemente el rango de operación, pero ya estaría fuera del rango de frecuencias para radioaficionado. Pruebas técnicas me confirman que el Iler 40 anda bien entre los 6,8 y 7,3 MHz. También es posible reducir el rango de operación a sólo aquel en que se trabaja fonía SSB.
El centro de nuestro diseño será el sintetizador digital directo AD9850 de Analog Devices, el que adquirí en forma de módulo que incluye el generador de reloj a 125 MHz y filtro elíptico anti-alias. Estará comandado por el microcontrolador de Microchip PIC16F877A (mi viejo caballo de batalla). Utilizaré un display de 20×4 caracteres, pulsadores (botones) y el codificador rotatorio de bajo costo KY-040 para el dial principal.
Conexiones entre Iler 40 y el hardware diseñado por mi para este transceptor (imagen extraída de mi post en inglés).
Más información sobre Síntesis Digital Directa en este link, artículo que publiqué en mi web hace algunos meses.
El circuito implementado es el que muestro a continuación:
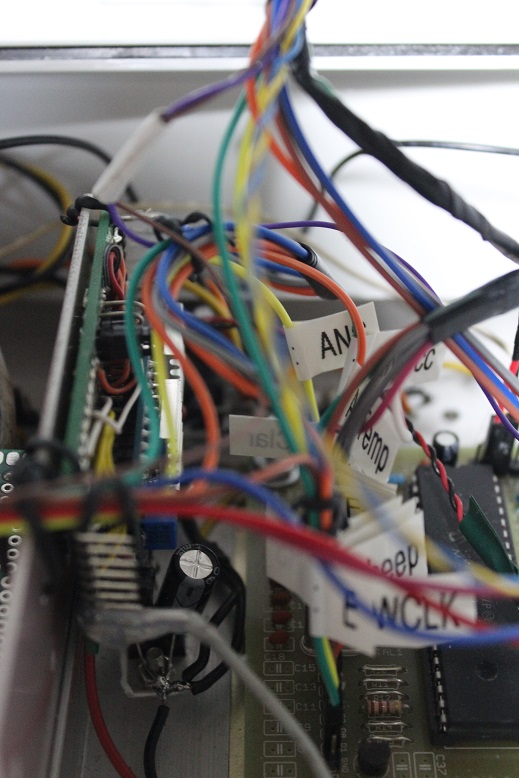
Esquemático de la unidad de control, construida en base al microcontrolador PIC16F877A y el sintetizador digital directo AD9850. (Haz click sobre la imagen para ver detalles).Conexionado botones y Rotary Encoder KY-040.Conexionado entre unidad de control y módulo DDS. Salida filtrada de RF se conecta a pin L.O. (Oscilador Local) en Iler 40. Haz click para agrandar imagen.Vista general del interior del transceptor.Tarjeta de RF Iler 40, desarrollado por EA3GCY, con PCB con circuitos necesarios para operar el Iler 40 desde el microcontrolador. Más info sobre el Iler 40, visitar la web www.qrphamradiokits.com.Instalación del transistor de salida (en este caso un 2SC2078) con un buen disipador térmico.Vista de circuitos digitales de este QRP. Se observa tarjetas con DDS AD9850 y PIC16F877A.
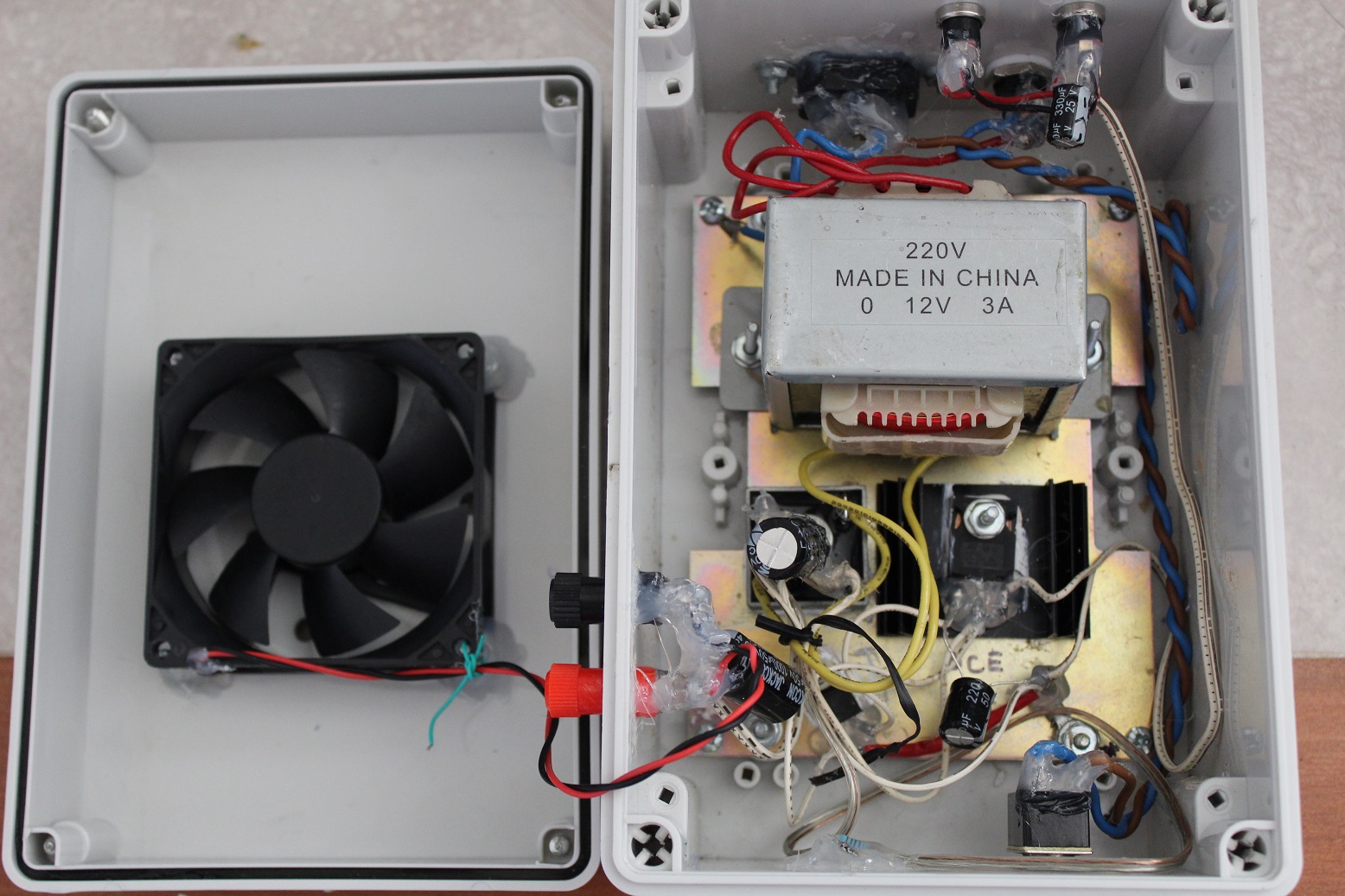
También construí una sencilla fuente de alimentación lineal de 12VDC 3A, a la que dispuse 2 jack de salida. Conecto este QRP en uno de estos jacks, mientras que el otro lo utilizo para el FT-817ND.
Interior de la fuente de poder lineal 12VDC 3A para QRPs.
La fuente anda bastante bien. Le puse un ventilador de 24VDC, pero alimentado directamente desde el puente rectificador (previo al regulador de voltaje), recibiendo unos 16VDC, con los que opera más lento y, por ende, menos ruidoso. El flujo de aire generado es suficiente para mantener una adecuada temperatura en la circuitería, especialmente en el transitor de paso de corriente (un TIP35C). Pronto publicaré detalles constructivos de esta fuente. ACTUALIZACIÓN: Este es el link con detalles de la fuente de poder.
Y bueno… una breve prueba RX con una antena de hilo largo. No lo hice operar en TX pues arriesgo el transistor de potencia, dada la elevada R.O.E. de esta antena. En todo caso, pruebas con carga fantasma me indican que el equipo entrega unos 4W P.E.P. sobre 50 Ohmios.
Notarás que el equipo hizo ruidos extraños cuando acerqué la cámara con que grabé este video. Ocurre porque la electrónica de RF no está apantallada (es una caja plástica!), lo que la hace sensible a ruidos electromagnéticos generados por fuentes cercanas, como mi teléfono celular.
Cuando el tiempo y el espacio me lo permitan, construiré una antena para 40 metros y les mostraré nuevos videos de este sencillo y efectivo transceptor SSB.
Si te animas a contruirlo y necesitas orientación, no dudes en escribirme.
En este artículo escribo sobre lo que es una verdadera maravilla tecnológica, gracias a la cual hoy podemos hacer sintetizadores de señal de gran versatilidad, precisión y estabilidad con hardware reducido. Es el llamado Sintetizador Digital Directo (o Direct Digital Synthesizer DDS).
Foto 1. Mi primera tarjeta DDS. Elaboré este header para el chip AD9852 de Analog Devices (año 2009).
Esta modalidad de síntesis de señales poco a poco ha ido reemplazando a los clásicos circuitos PLL (lazo enclavado en fase), debido a su mayor capacidad de resolución en frecuencia y fase (y también de amplitud en algunos modelos de DDS). Gracias a estas cualidades es posible construir en forma más sencilla transmisores de gran estabilidad, receptores de precisión para instrumentación y moduladores para señales complejas como QAM, entre otras cosas.
Analizaremos brevemente aspectos teóricos de su funcionamiento y finalmente veremos cómo construir uno para nuestro uso en experimentación. Al final de esta página podrás encontrar los links de descarga con toda la información necesaria para que hagas tu propio oscilador local DDS, basado en el módulo AD9850 @ 125 MHZ..
Ahora bien… ¿Cómo funciona un sintetizador digital directo? veamos un poco de teoría…
Oscilador Numéricamente Controlado (NCO)
El corazón del proceso de síntesis digital directa es el llamado Oscilador Numérico Controlado (NCO por sus siglas en inglés). A continuación describo brevemente como opera:
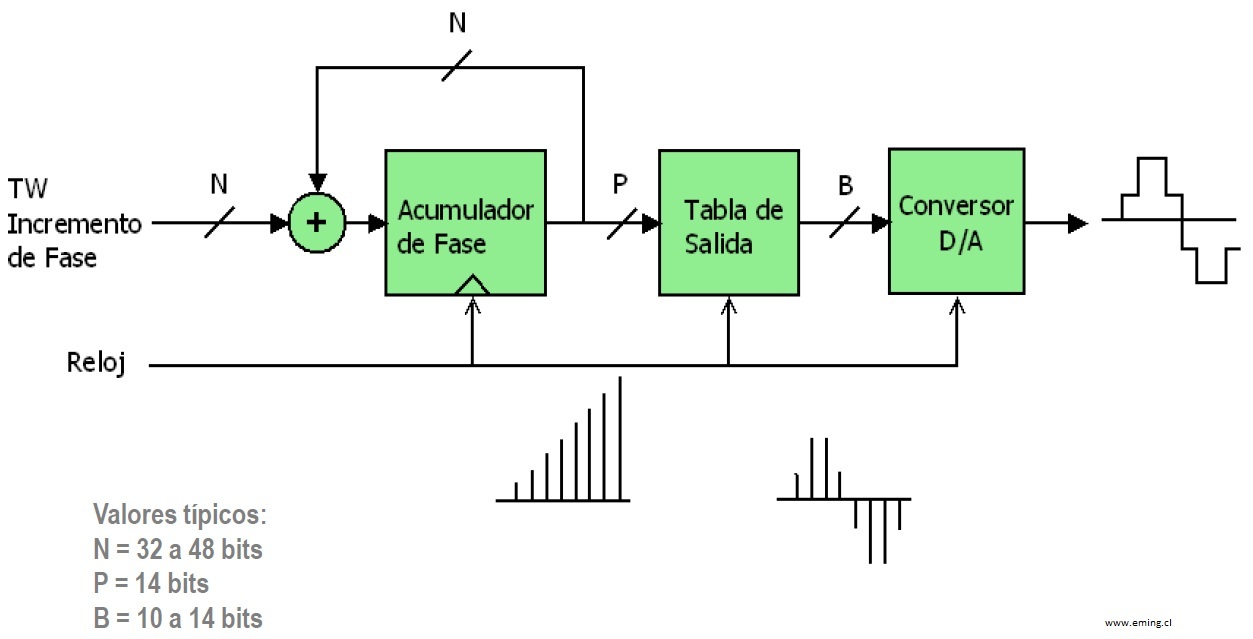
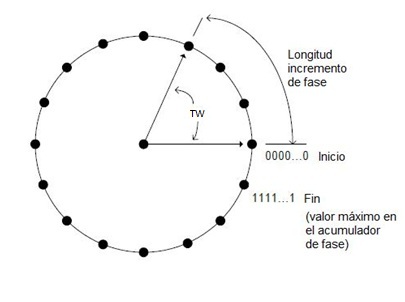
Vamos a la figura 1. Un registro (número) de N bits, llamado acumulador de fase, con cada ciclo de reloj se incrementa en un cierto valor que denominaremos incremento de fase TW. El acumulador de fase puede tener un valor – expresado en números decimales – entre 0 y 2^N – 1 (2 elevado a N, menos 1). Este incremento periódico del valor numérico contenido en el acumulador de fase hará que luego de determinada cantidad de ciclos de reloj alcance su valor máximo 2^N – 1. Mientras mayor sea el valor de TW, se requerirán menos ciclos de reloj para llegar al valor máximo del acumulador de fase, el cual una vez alcanzado hace que el valor del acumulador de fase vuelva a reiniciar a la siguiente suma de TW (siguiente ciclo de reloj). Podemos hacer la analogía entre el acumulador de fase y el ángulo de un fasor que gira a incrementos constantes TW (ver figura 2), donde 0° es el valor numérico 0 y cuyos 360° equivalen a un valor 2^N (ver figura 2).
Figura 1. Esquema básico de un oscilador numéricamente controlado (NCO), bloque fundamental de un DDS.Figura 2. Analogía entre el contenido del acumulador de fase de N bits (2^N puntos completan la circunferencia), y un fasor que gira a pasos de longitud TW.
Si en el bloque denominado tabla de salida (figura 1) a cada valor contenido en el acumulador de fase asociamos un determinado valor de amplitud, por ejemplo una sinusoide, tenemos un oscilador digital sinusoidal. En la práctica, a cada valor contenido en el acumulador de fase se le considera una dirección de memoria apuntada hacia los datos contenidos en la tabla de salida, y son estos datos los que contienen la amplitud de correspondería al seno (o coseno) del ángulo equivalente al número contenido en el acumulador de fase. Como los valores típicos de N van desde los 32 hasta 48 bits, si asociáramos a cada valor posible en el acumulador de fase una determinada amplitud, ¡ocuparíamos excesiva memoria!, por lo cual en la práctica se consideran sólo los P bits más significativos (usualmente 14 bits en DDS comerciales).
El valor de TW no necesariamente será un divisor exacto de 2^N, por lo cual al completar un ciclo (giro completo del fasor mostrado en la figura 2) podría no empezar en valor 0 el siguiente ciclo, sino en una fracción de TW. En esencia, cuando con la siguiente adición de TW al acumulador de fase sobrepasa la capacidad numérica de este, simplemente se ignora el bit de acarreo (overflow en inglés) y el ciclo se inicia nuevamente desde un valor numérico correspondiente a la fracción de TW que se puede expresar en N bits, contenida en el acumulador de fase.
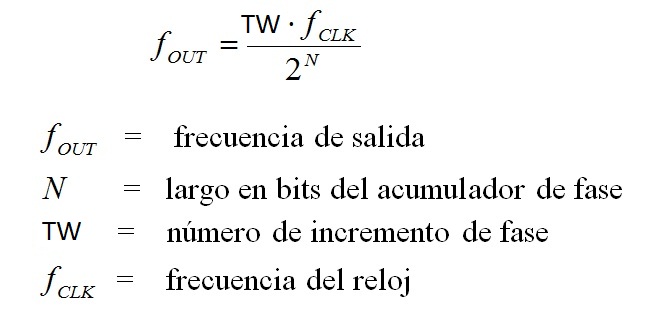
Según sea el valor contenido en el acumulador de fase, en cada ciclo de reloj se envía al conversor digital – analógico el valor correspondiente de la tabla de salida, obteniendo a la salida de este una sinusoide cuya frecuencia es función de TW (valor que controlamos externamente), la frecuencia de reloj (fija, definida por el hardware) y N (capacidad del acumulador de fase, también definido por el hardware). La ecuación que determina la frecuencia de salida es la siguiente:
Ecuación 1. Definición de la frecuencia sintetizada en un DDS. Frecuencia máxima utilizable está definida por el límite de Nyquist. Sin embargo, en la práctica, se puede considerar un valor razonable el 30% de la frecuencia del reloj.
Notar que para obtener frecuencias múltiplos exactos de 1 Hz, es necesario que la frecuencia de reloj sea una potencia de 2 – suponiendo exacta la frecuencia de reloj -. Sin embargo, para DDS con un acumulador de fase de 32 bits o más, la cantidad de frecuencias posibles es tan elevada que la resolución en frecuencia es muy fina (paso entre frecuencias posibles a generar por el DDS es de orden de fracción de Hz), con lo cual aunque utilicemos relojes de frecuencias comunes (125 MHz, por ejemplo) podemos aproximarnos a la frecuencia que se desea generar con error inferior a 1 Hz, más que suficiente para cualquier aplicación práctica.
Consideraciones respecto del espectro de salida de un DDS
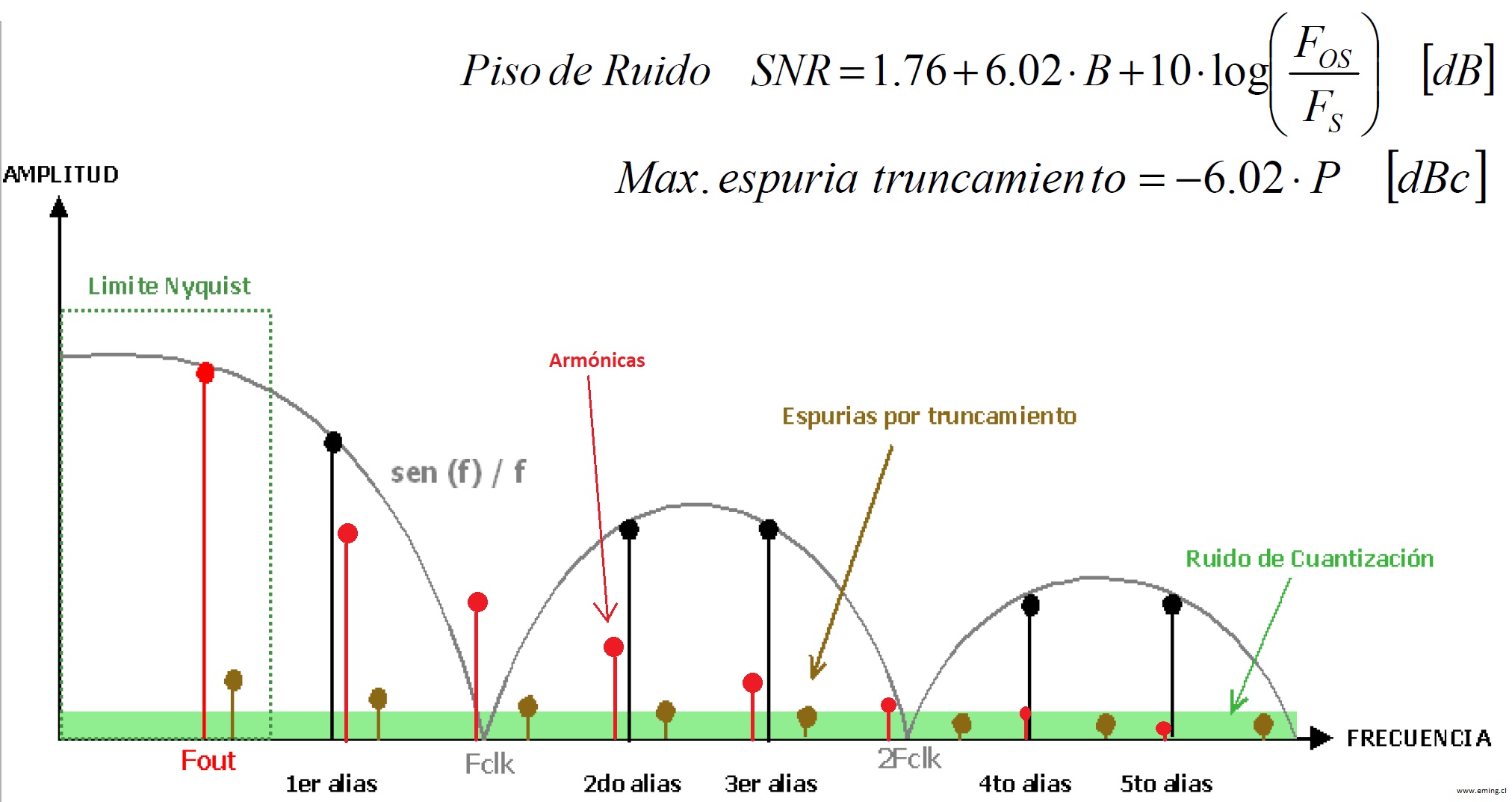
En la figura 3 tenemos un dibujo simplificado donde aparecen las principales componentes espurias que se generan en un DDS.
Figura 3. Dibujo simplificado donde podemos ver las principales frecuencias espurias generadas por el DDS en operación estática. Piso de ruido dado por el error de cuantización, componentes por aliasing, frecuencias armónicas y espurias por truncamiento del número de fase.
A continuación una breve descripción de cada una de ellas:
Frecuencias alias por digitalización de la señal. Por efecto alias, se observan componentes cuyas frecuencias están dadas por las sumas y restas de múltiplos de la frecuencia de muestreo (reloj fclk) y la fundamental (frecuencia de salida fout). El principal objetivo del filtro implementado en el módulo AD9850 es filtrar estas frecuencias imágenes.
Ruido de cuantización.El proceso de conversión digital a analógica, donde se obtiene un voltaje sinusoide, al tratarse de una señal digital tenemos que existe una diferencia entre el valor entregado por el conversor y aquel que debería tener la sinusoide. Este error de cuantización está determinado por la resolución del conversor D/A (típicamente entre 10 y 14 bits para DDS comerciales). Es razonable pensar que la potencia de ruido generada por este error de cuantización se distribuye uniformemente en toda la banda definida por el límite de Nyquist (es decir, desde 0 Hz hasta la mitad de la frecuencia de reloj Fclk/2), por lo cual es posible reducir el piso de ruido si se incrementa la frecuencia de reloj. En la figura 3 se representa el piso de ruido y la relación señal a ruido determinada por el error de cuantización, suponiendo un conversor D/A de B bits y Fs = 2*fout, donde Fos es la frecuencia de sobremuestreo (Fos > Fs), es decir, frecuencia a la cual se puede incrementar el reloj del DDS. En la práctica, por ejemplo, si Fs = fclk = 80MHz, teóricamente el valor máximo de la frecuencia de salida es fout = 40MHz (definido por límite de Nyquist), pero podemos mejorar la SNR teórica que define la resolución del conversor D/A a través del uso de una frecuencia de reloj más elevada, por ejemplo, fclk = 125MHz, pues distribuiremos la potencia de ruido de cuantización en un rango mayor de frecuencias (desde 0Hz hasta 62.5MHz). Otra forma de verlo es que, para una frecuencia de reloj fclk dada, la SNR definida por el ruido de cuantización será mayor cuando la frecuencia sintetizada fout sea mucho menor que el límite de Nyquist (fclk/2). Por ello, nos convendrá utilizar DDS con frecuencia de reloj elevada, aunque las frecuencias que queramos sintetizar sean mucho menores que la mitad de la frecuencia de reloj.
Espurias por truncamiento del número de fase. Como indiqué en un párrafo anterior, por motivos prácticos la tabla de salida del NCO no puede contener tantos registros como valores posibles tenga el acumulador de fase (piensen que para un acumulador de N = 32 bits necesitamos varios GB, y para N = 48 bits son centenares de TB!), y por esto existe un error en la conversión entre el ángulo de salida de la sinusoide (que considera sólo los P bits más significativos) y el ángulo contenido en el acumulador de fase. Este error tiene periodicidades, las que definen frecuencias espurias. En términos prácticos, aquella componente espuria de mayor amplitud estará a -6.02P dB de la frecuencia fundamental (fout), con típicamente P = 14 bits, y el número de incremento de fase equivalente de la mayor espuria por esta causa estará dado por el máximo común divisor entre el número de incremento de fase TW y 2^(N-P-1). Si el número de incremento de fase satisface que el máximo común divisor entre TW y 2^(A-P) es 2^(A-P), entonces no hay espurias por truncamiento de fase, ya que el error de ángulo sería constante en todo el ciclo (no hay periodicidad, por lo tanto no hay frecuencias asociadas).
No linealidades del conversor digital – análogo.Es imposible construir un conversor ideal, por lo que siempre – al igual que en los amplificadores – existirán componentes armónicas de la fundamental causadas por no linealidades en el proceso de conversión. En ciertas oportunidades pueden ser beneficiosas, pues las frecuencias armónicas son múltiplos de la frecuencia de salida, las que pueden ser utilizadas por la electrónica. Un buen ejemplo de aquello es la Application Note AN-543, donde se utilizan las componentes armónicas provenientes de un AD9850 (con frecuencia de reloj de 125 MHz, por lo tanto, con una frecuencia de salida teórica máxima de 62.5 MHz -límite de Nyquist-) para implementar un transmisor para radiodifusión sonora modulado digitalmente (que opera entre 88 y 108 MHz).
Jitter.A variaciones instantáneas de la frecuencia se le denomina «jitter», y en un DDS puede ser causado por el jitter propio del generador de reloj (por ello es importante utilizar aquellos que sean muy estables), por circuitos PLL de reloj (típicamente los DDS con frecuencias de reloj muy elevadas suelen utilizar circuitos PLL para multiplicar la frecuencia de reloj de entrada, generando jitter y ruido de fase). También se puede ocasionar por acoplamiento entre las pistas del circuito de reloj y fuentes externas de RF, o bien por ruido térmico.
En fin… como todo circuito electrónico, especialmente si conjuga señales analógicas y digitales, tenemos diversas causas que pueden generar componentes espurias. Lo ideal es asegurarse de construir un hardware debidamente protegido de las EMI, y tener una señal de salida que aproveche toda la escala del conversor D/A con una frecuencia muy inferior al límite de Nyquist (fclk/2).
Ahora vamos a encender el cautín… construyamos nuestro propio oscilador local con un sintetizador digital directo, basado en AD9850 de Analog Devices.
Este proyecto está basado en el módulo DDS AD9850 con reloj de 125 MHz, disponible por Ebay y Amazon. Puedes trabajar con instrumentos básicos (multímetro), una radio MF/HF y/o un SDR (como el famoso RTL) para «escuchar» las frecuencias que sintetizas. Aquí muestro mediciones con instrumentos debidamente calibrados (excepto el frecuencímetro del osciloscopio… no le crean… lee bien hasta 3 MHz… el analizador de espectro es mucho más confiable) con el objetivo que puedas visualizar los resultados que obtendrás.
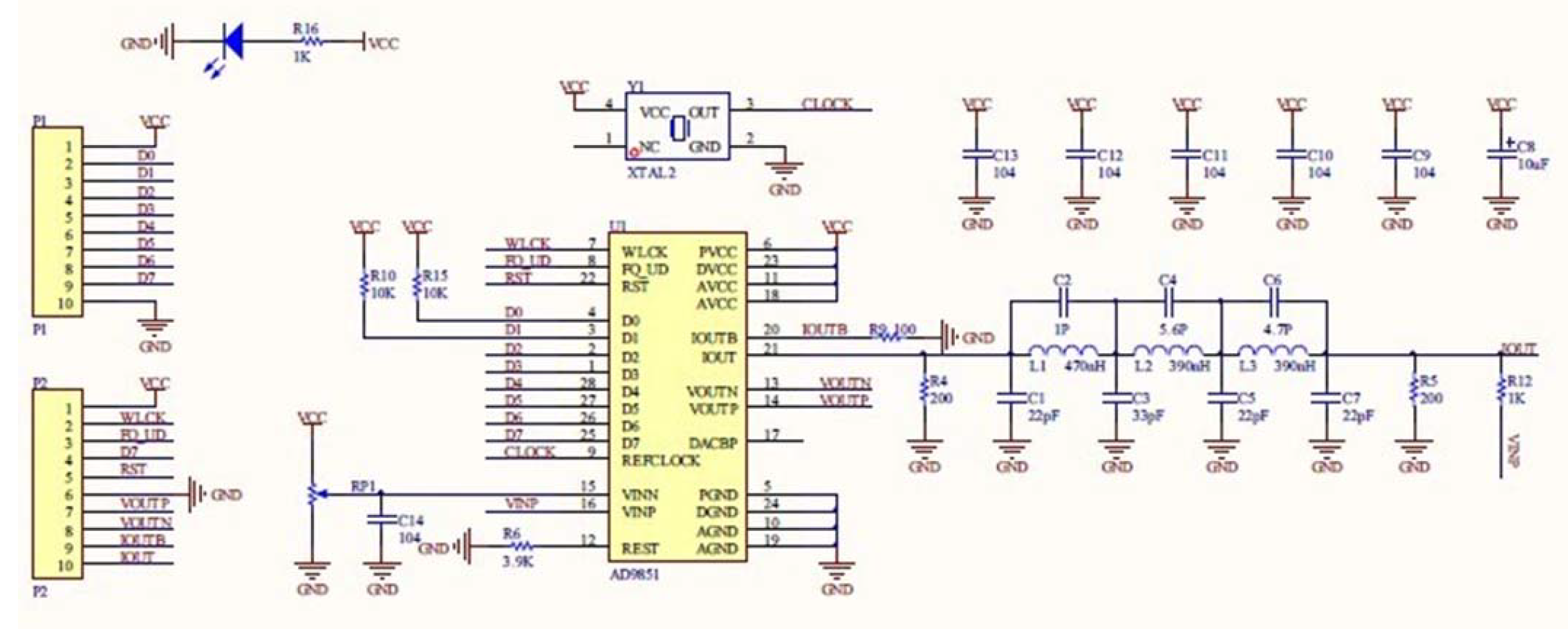
Bueno… vamos al circuito:
Figura 4. Esquemático con circuito para implementar oscilador local basado en el módulo DDS AD9850 @ 125MHz. Utiliza un microcontrolador PIC16F877A con un cristal de 4MHz y display LCD de 16×2 caracteres.
La tarjeta basada en PIC tiene muchos años… está reciclada de un proyecto que desarrollé en tiempos remotos. Si bien los microcontroladores PIC de la serie 16 son bastante «vintage» a estas alturas del partido, de vez en cuando los utilizo porque son muy confiables. Unos colegas me contaron que incluso algunos CubeSat que andan orbitando por la ionósfera tienen microcontroladores PIC en su interior 🙂 – aunque series más modernas -.
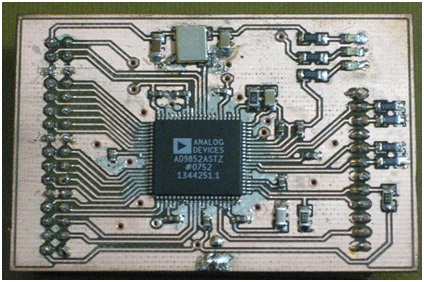
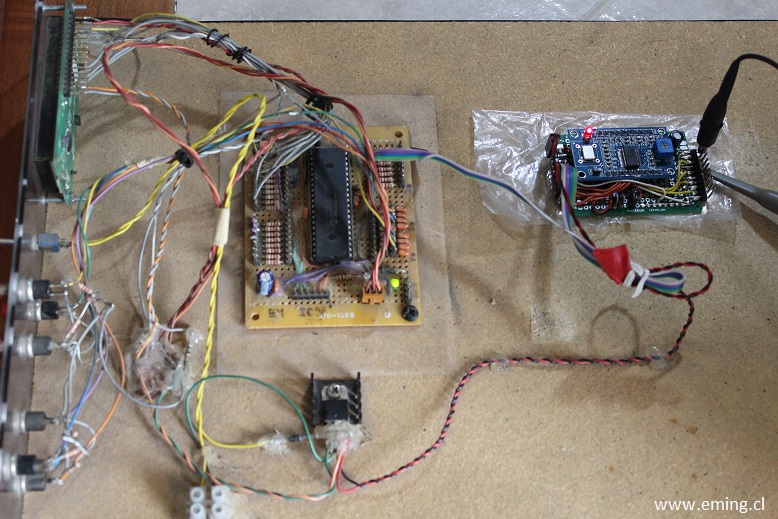
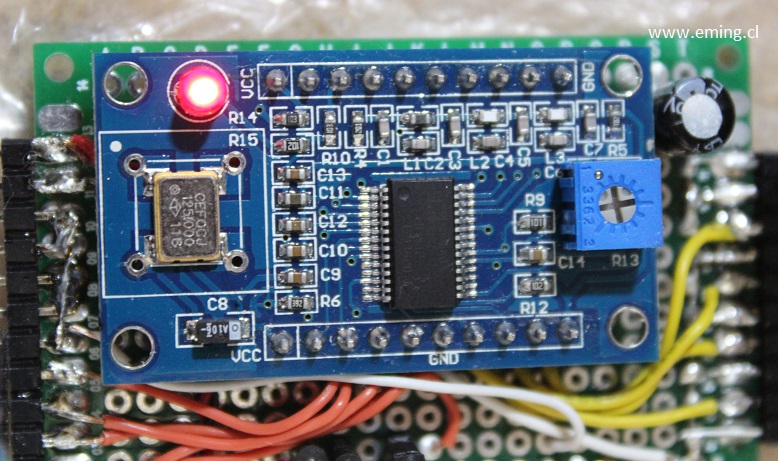
Figura 5. Módulo DDS con AD9850 y reloj de 125 MHz. Fuente: EIModule.Figura 6. Pines del módulo AD9850. Fuente: EIModule. Los pines D0 y D1 deben conectarse a +5VDC, mientras que RESET, D2, D3, D4, D5 y D6 a GND. D7 se usará como pin DATA (es el mismo pin que se indica como DATA). Los pines que van al microcontrolador son W_CLK, FQ_UD y DATA, además de +5VDC y GND que son comunes. Las salidas son SINE OUTPUT (1 con filtro anti-alias, 2 sin filtro) y SQUARE OUTPUT (1 y 2, complementarias).Foto 2. Podemos ver el módulo DDS AD9850 con su reloj de 125MHz, tarjeta con el PIC16F877A, regulador lineal 7805 (con disipador térmico), panel frontal con LCD 16×2, switch de encendido y botones de control.Foto 3. Módulo AD9850. El potenciómetro permite el ajuste del voltaje de referencia que ocupa el comparador para generar señales cuadradas de 5Vpp, comparando esta referencia con la salida sinusoidal. Moviendo ese potenciómetro, puedes ajustar el ciclo de trabajo de esta señal, muy útil para excitar, por ejemplo, un amplificador de RF clase E.
Y luego de mucho ensayo – error en la programación del PIC, tenemos los resultados que se muestran a continuación:
Formas de onda:
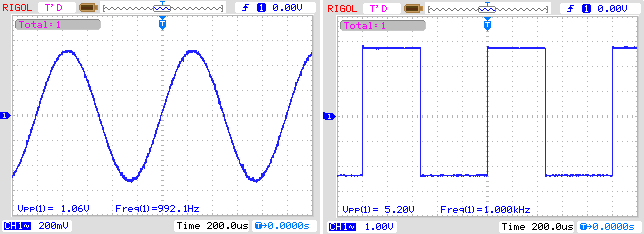
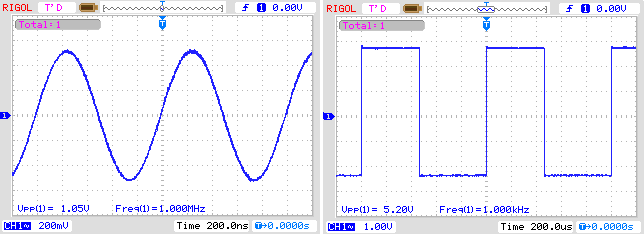
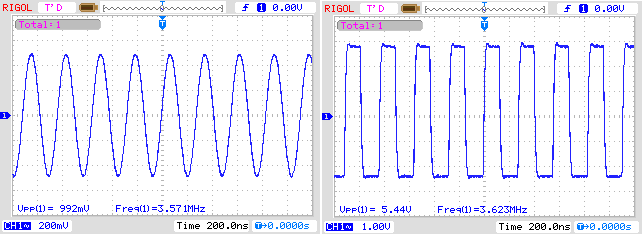
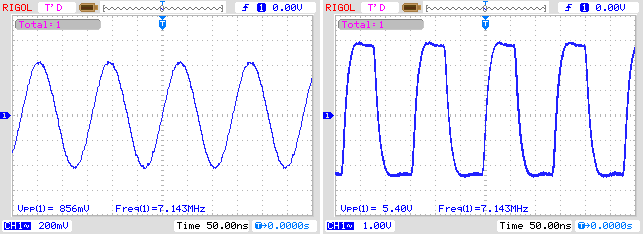
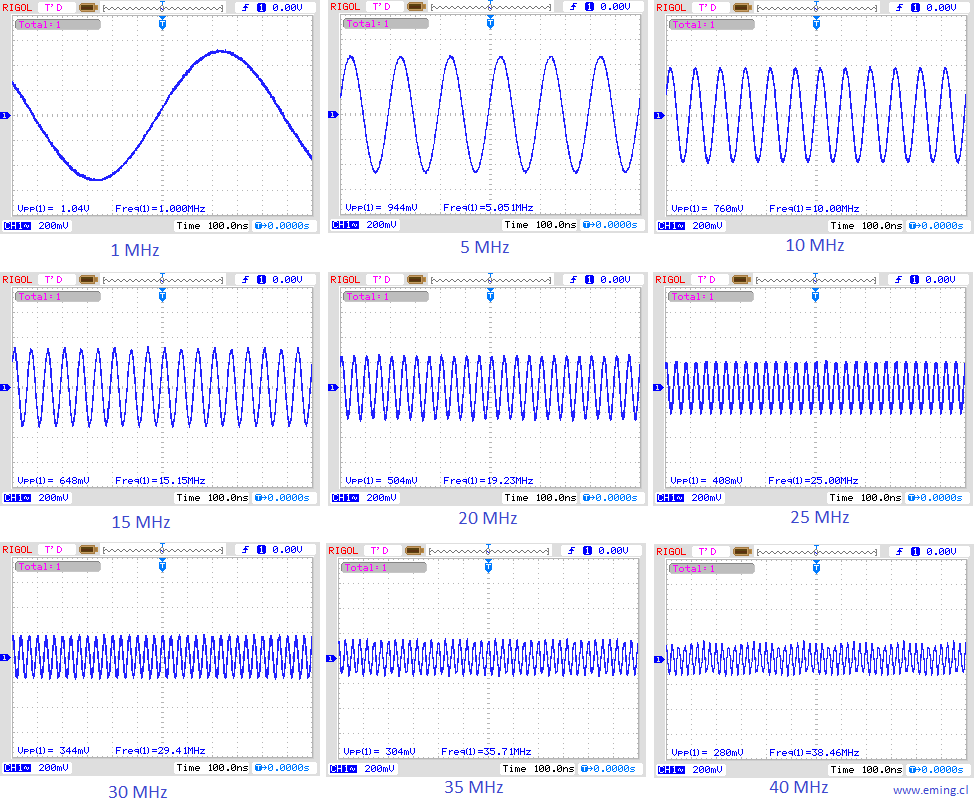
Figura 7. Formas de onda Fo = 1 kHzFigura 8. Formas de onda a Fo = 1 MHz, onda media. La onda cuadrada está perfecta para excitar un amplificador clase E para radiodifusión sonora en amplitud modulada.Figura 9. Formas de onda a Fo = 3.6 MHz, banda de 80 metros. Nótese la alta calidad del comparador. Insisto….. es perfecto para implementar transmisores con etapas clase E.Figura 10. Formas de onda a Fo = 7.15 MHz, banda de 40 metros.Figura 11. Forma de onda para diferentes frecuencias generadas por DDS, manteniendo escala de tiempo y amplitud constantes en todas las mediciones. Nótese como se reduce la amplitud a medida que se incrementa la frecuencia.
Espectro de salida:
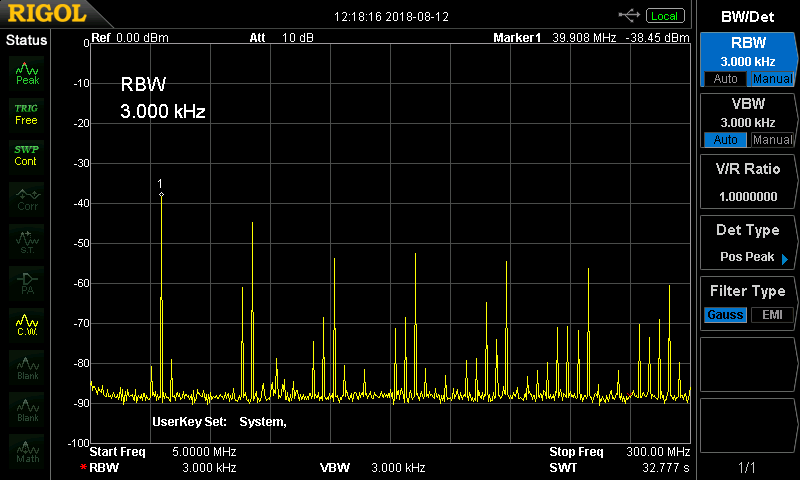
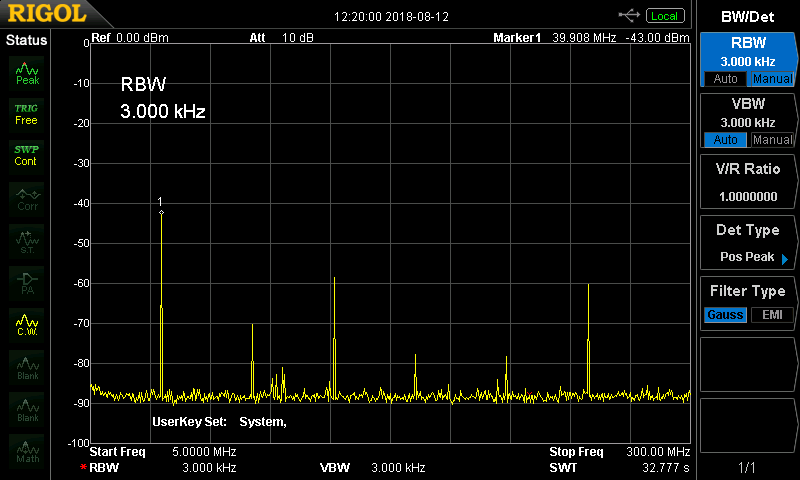
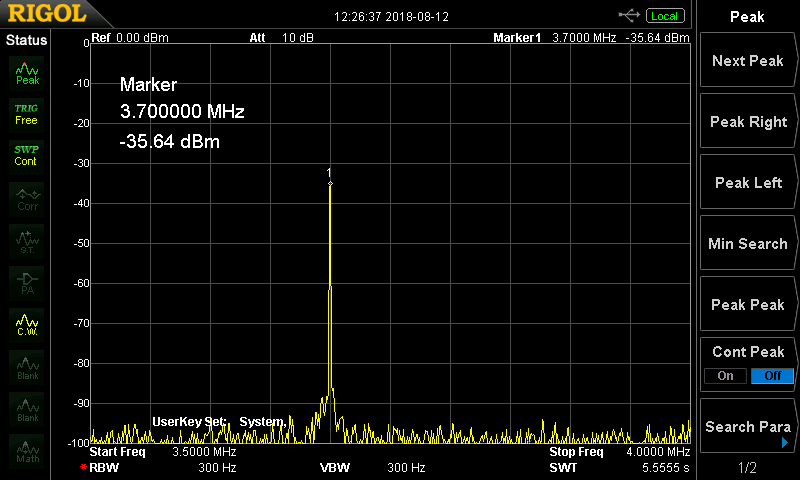
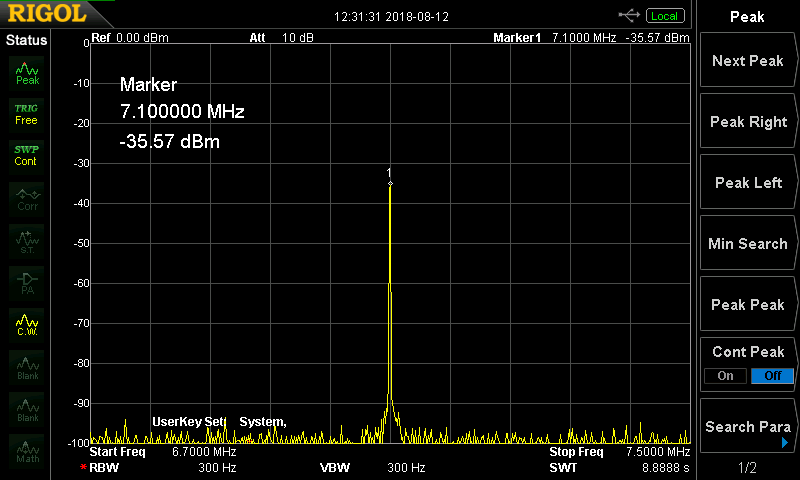
Figura 12. Espectro de salida con Fo = 40 MHz y sin filtro. Aquí podemos ver claramente frecuencias alias y también armónicas.Figura 13. Espectro de salida a Fo = 40 MHz y con filtro. Observamos una importante reducción en las componentes espurias, especialmente en frecuencias generadas por efecto alias. Es poco efectivo filtrando componentes armónicas.Figura 14. Espectro a 1 MHz. Contrario a lo que esperaba, a baja frecuencia (es sólo 1 MHz) tenemos bastantes espurias, algunas de las cuales están por sobre los -40 dBc. Supongo se debe a ruidos externos provenientes, por ejemplo, de conmutaciones digitales de aparatos del entorno o el microcontrolador, o de las potentes emisoras broadcast que hay cerca de mi casa. Es algo que voy a investigar con calma. Sin embargo, a esta frecuencia el DDS sigue siendo una excelente opción para amplificadores conmutados, como los utilizados en transmisores de alta eficiencia para radiodifusión en AM. El analizador de espectro se configuró para que marcara la frecuencia donde estuviera la intensidad peak… nótese la altísima precisión del generador DDS. ACTUALIZACIÓN: Las espurias no identificadas corresponden a portadoras de radioemisoras AM.Figura 15. Espectro a 3.7 MHz. Espectro bastante limpio, por lo cual este oscilador es adecuado para utilizarse en equipos con receptores heterodinos y amplificadores lineales. Ejemplo con fundamental en la banda de 80 metros.Figura 16. Espectro a 7.1 MHz. Al igual que en la figura anterior, espectro bastante limpio, por lo cual este oscilador es adecuado para utilizarse en equipos con receptores heterodinos y amplificadores lineales. Ejemplo con fundamental en la banda de 40 metros.
Mi intención es probar este sintetizador como oscilador local para un transceptor SSB en kit que tengo ensamblado, pero actualmente en formato OFV con polivaricon. Es el Iler 40. Una maravilla que necesita de un buen OFV.
Comportamiento energético y térmico…
Luego de pruebas en diferentes frecuencias, noté que cuando generaba un fout mayor a 20MHz, el DDS se calentaba a temperatura sensible al tacto. Por ello, luego de dejar apagado el dispositivo unos minutos hasta que alcanzara temperatura ambiente, lo encendí con fout = 40MHz y, al minuto de operación y temperatura ambiente de 18°C, el AD9850 alcanzó una temperatura de 41.28°C. Por ello, estimo recomendable utilizar disipador térmico. Me parece buena opción ocupar estos que hay que el comercio para los chips del Raspberry Pi (esos que tienen un autoadhesivo para pegarse al chip).
Foto 4. Imagen térmica donde se aprecia el chip DDS a 41°C.
Como observamos en la figura 11, a medida que incrementamos la frecuencia de salida, tenemos que la amplitud de la señal va disminuyendo. Algo diferente ocurre con el consumo de corriente. El circuito completo, es decir, DDS + reloj+ microcontrolador + display, operando a 1kHz consume 170mA aprox., a 1MHz se eleva a 190mA, y a 40MHz llegamos a los 210mA. Como no tenemos un incremento en la potencia de salida del DDS (de hecho, es al revés), no nos queda otra opción que la potencia adicional que consume el DDS se debe estar disipando en forma de calor. Por ello, me parece muy necesario poner aunque sea un pequeño disipador, sobre todo si la temperatura ambiente de donde se utiliza este oscilador es alta… y vamos que con el calentamiento global quizás a qué extremo vamos a llegar.
Algunas aplicaciones de esta tecnología pueden ser:
Generadores de señal con modulaciones complejas, especialmente en DDS que permiten incorporar información en la amplitud. Un buen ejercicio sería implementar hardware donde se conecte un DDS con sus pines de programación paralela a una FPGA, de modo que podamos implementar circuitos de refresco de frecuencia, fase y amplitud de alta velocidad. Un circuito como este servirá para muchas cosas. ¡interesante futuro proyecto!.
Oscilador local en transmisores y/o receptores de radio. Ideal para equipos de banda lateral única (SSB).
Sintetizadores de audiofrecuencia de alta precisión.
Instrumentos de medición, como analizadores de espectro y analizadores de antenas.
Receptores de alta precisión para radioastronomía. Gracias a la gran cantidad de canales posibles, son una buena alternativa para construir receptores heterodinos que permitan hacer análisis de corrimientos de frecuencia por efecto Doppler para velocidades relativamente bajas. Con buenos filtros de frecuencia intermedia, podemos observar desplazamientos muy pequeños, del orden de los Hz.
¿Quieres construir tu oscilador local con DDS AD9850?:
Así quedó mi primer prototipo. En los links de descarga puedes encontrar la información necesaria para replicarlo.
Foto 5. Panel frontal de mi prototipo de sintetizador DDS con AD9850. Si quieres construirlo, te sugiero seguir esta misma distribución de display y botones. Queda muy cómodo para manipular.
Para minimizar espurias en la señal de salida, recomiendo montar la electrónica en una caja metálica a tierra y protegerla de RF producida en etapas de potencia y/o aquellas con conmutaciones digitales de alta velocidad. No olvides poner disipador térmico al DDS!!.