(HF End Fed Half Wave multiband antenna, for 40, 20 and 11/10 meter band).
Buscando una alternativa fácil de instalar, simple y menos aparatosa para implementar una antena multibanda capaz de operar en las bandas de 40, 20 y 11/10 metros, llegué a la famosa antena de media onda alimentada en un extremo. A través de E-bay adquirí una versión comercializada por Par Electronics, la EF-10/20/40 MKII, con la que comprobé efectividad y bajo ruido de este tipo de antenas cuando operan en forma horizontal.
Si deseas conocer en detalle esta antena, te recomiendo visitar el excelente sitio web de Steve Yates AA5TB (www.AA5TB.com). Por mi parte, haré sólo una breve descripción teórica, pues me enfocaré en la construcción de esta EFHW para 10/11, 20 y 40 metros, y en mostrar los resultados obtenidos. Los detalles constructivos están basados en el artículo publicado por PA3HHO (https://pa3hho.wordpress.com/end-fed-antennes/multiany-band-end-fed-english/). Mi idea es reproducir este trabajo y contar mi experiencia. En caso de surgir alguna mejora posible, también la comentaré.
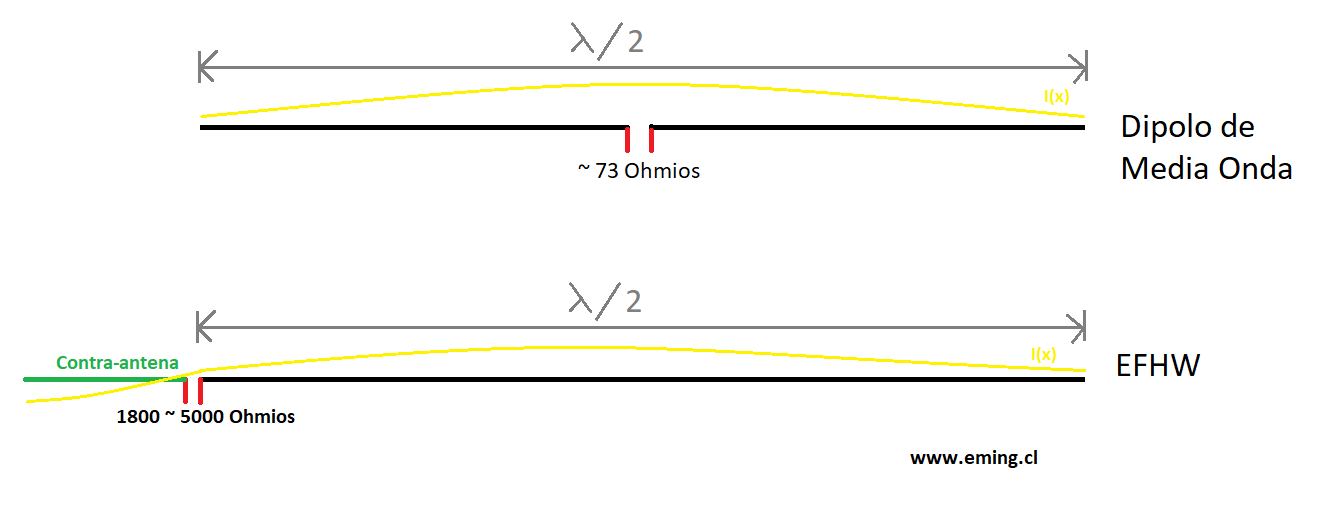
¿En qué consiste la antena EFHW (Antena Multibanda de Media Onda Alimentada en un Extremo)?
Es un dipolo de media onda, pero en vez de conectarse la línea de bajada en el centro, se conecta en un extremo (ver Fig. 1). A mi parecer, la gran gracia de esta antena es que podemos utilizar el mismo hilo radiante para varias bandas de frecuencias armónicas, puesto que un hilo conductor de media onda a la frecuencia F, resonará en onda completa completa a 2*F, y en 3/2 de onda a 3*F, y así sucesivamente, siendo el punto de alimentación (en un extremo) siempre de impedancia muy elevada. Por ello, podemos construir antenas mutibanda utilizando un único hilo radiante, lo que hace más facil su instalación y uso como antena portable (por ejemplo, en salidas a acampar).
Al alimentarse en un extremo, como se mencionó anteriormente, la impedancia en el punto de alimentación es altísima (de 2000 a 3000 Ohmios), y por lo mismo requiere un adaptador de impedancias si se quiere conectar a la línea de 50 Ohmios. Típicamente, se usa un transformador de banda ancha con núcleo de ferrita toroidal o binocular, como veremos más adelante.
Si se tiene una alta impedancia en el punto de alimentación, observaremos que la tensión de RF durante TX se eleva a varios kV si utilizamos potencia considerable, lo que hace críticas las características constructivas del módulo adaptador de impedancia. Por otro lado, habitualmente se ocupa el recubrimiento exterior (malla) del cable coaxial de bajada de antena como contrapeso (o contra-antena), lo que hace que este se comporte como parte del sistema radiante y por lo mismo se generan corrientes en modo común que eventualmente pueden afectar el rendimiento de la antena y la captación de ruido. Estas corrientes de modo común se pueden reducir drásticamente mediante el uso de un filtro de modo común (o balún de corriente, o choque de RF), el que debe ser instalado previo al ingreso de la línea coaxial al cuarto de radio. Así evitaremos meter RF en nuestros equipos cuando estemos en TX, y a la vez reduciremos la captación de ruido por parte de la línea coaxial en RX.
Para la adaptación de impedancias, la razón de transformación más utilizada es 1:8, donde en el lado de baja impedancia tenemos la línea de 50 Ohmios y en el lado de alta se coloca el hilo radiante de longitud eléctrica equivalente a media longitud de onda de la señal radiada (o recibida). Con esta razón de transformación tenemos mayor independencia de la R.O.E. (SWR) respecto del largo de la contra-antena (o contrapeso de la antena), siempre y cuando este sea superior al 10% de la longitud de onda de operación de la antena (ver sitio de AA5TB). Por lo mismo, si se trata de antenas multibanda, podemos escoger una longitud de contra-antena entre el 10% y 50% de la correspondiente a la frecuencia más baja de operación (en nuestro caso, banda de 40 metros).
Construyamos nuestra EFHW.
El diseño para las bandas de 40, 20 y 10 metros es el mostrado en la siguiente figura:
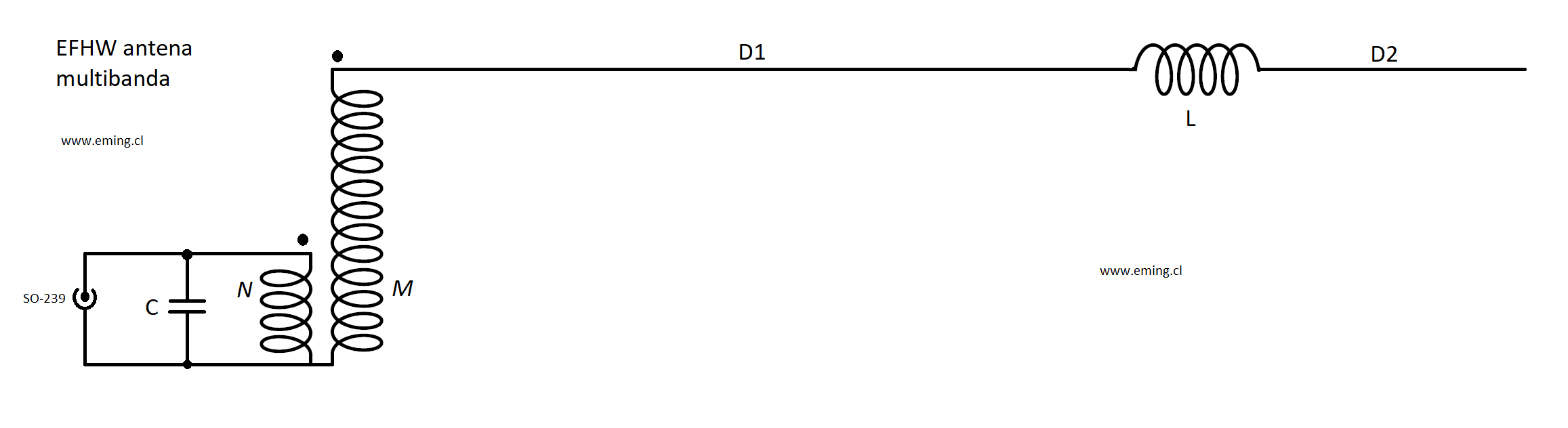
En 40 metros, el hilo se comporta como un brazo de media longitud de onda, recortado gracias a la presencia del inductor L, en nuestro caso de 34 uH. De este modo, logramos acortar el largo total de la antena, o sea D1 + D2 es menor que media longitud de onda en 40 metros, lo que a su vez reduce el ancho de banda y rendimiento en 40 metros.
Para las bandas de 20 y 10 metros, el inductor L se comporta como un choque de RF, es decir, como una impedancia tan elevada que prácticamente no permite el paso de corriente de RF hacia el tramo final de la antena (D2). De este modo, para 20 y 10 metros el largo total de la antena es D1, donde en el caso de 20 metros corresponde a media longitud de onda, mientras que en 10 metros a una longitud de onda completa, donde ambas maximizan su impedancia en el extremo.


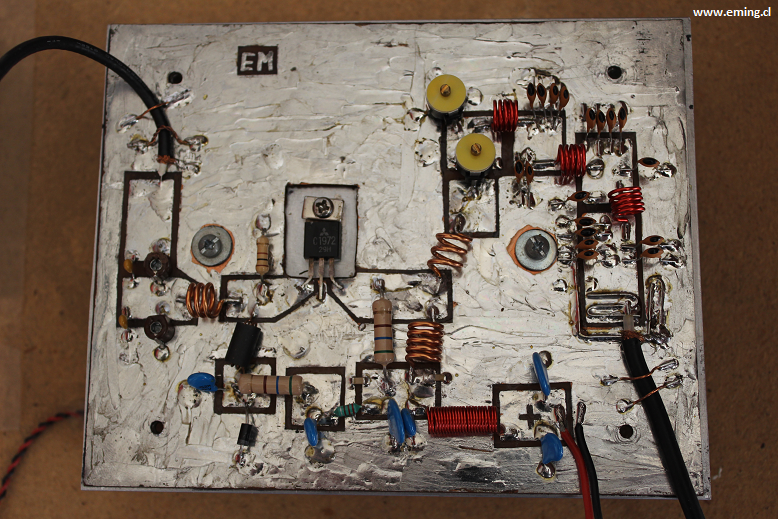
El transformador se ha hecho en base al toroide FT140-43 (Ver http://toroids.info/FT140-43.php), formado por 2 espiras bifilares + 14 espiras, con hilo de cobre esmaltado tipo 18 AWG. El secundario lo he enrollado en partes opuestas del toroide, con el objetivo de reducir capacitancias parásitas entre ambos extremos del bobinado. El toroide está recubierto de cinta dieléctrica para proteger la aislación del hilo que conforma el adaptador de impedancias, lo que no significa un problema pues en QRP no tendremos calentamiento del núcleo toroidal.
Para acortar la longitud de la antena de 40 metros, y también para aislar el último tramo de la antena (D2) en la operación de las bandas de 20 y 10 metros, se utiliza un inductor de L = 34 uH. Consiste en 65 vueltas de hilo 18 AWG sobre una tubo de PVC de 1 pulgada de diámetro.
Con el objetivo de obtener una satisfactoria operación del adaptador de impedancias en la banda de 10 metros, he colocado un capacitor de 150 pF en paralelo con el lado de baja impedancia del transformador (probando desde 50pF hasta 200pF, es el que mejor resultado ha dado). Debe soportar por lo menos 500V, como es en este caso, lo que es suficiente para operar equipos con potencias QRP (5W P.E.P o inferior), pues cuando se eleva la R.O.E. esta tensión puede llegar a máximos bastante elevados.
Luego de varias pruebas, las longitudes óptimas para D1 y D2 son:
D1 = 10.1 [m]
D2 = 1.6 [m]
Ajustadas a mi instalación en particular. Dependiendo del valor exacto de la inductancia, de la disposición del hilo radiante (horizontal, vertical o «v» invertida), del entorno (influencia de estructuras conductoras cercanas), tipo de suelo, trazado de la línea de bajada y postura de balún para filtrar corrientes en modo común, estas longitudes pueden variar.
Ensayos preliminares me han mostrado resultados interesantes… QSOs en la banda de 40 metros a más de 500 km de distancia, y en 10 metros a más de 2.000 km!, con sólo 5 W p.e.p. Una maravilla. Es ideal para salidas a terreno, pues su instalación es muy sencilla. Faltaría medir su eficiencia, especialmente el efecto del transformador toroidal, pero independiente de eso, lo fácil de su construcción, instalación, operación multibanda y experiencia de uso la hacen una opción interesante.
ACTUALIZACIÓN 06/10/2020: llegaron mis núcleos toroidales FT240-43!! pronto un nuevo artículo referente a esta antena…
Aunque… por el momento, un adelanto en la Fig. 5:
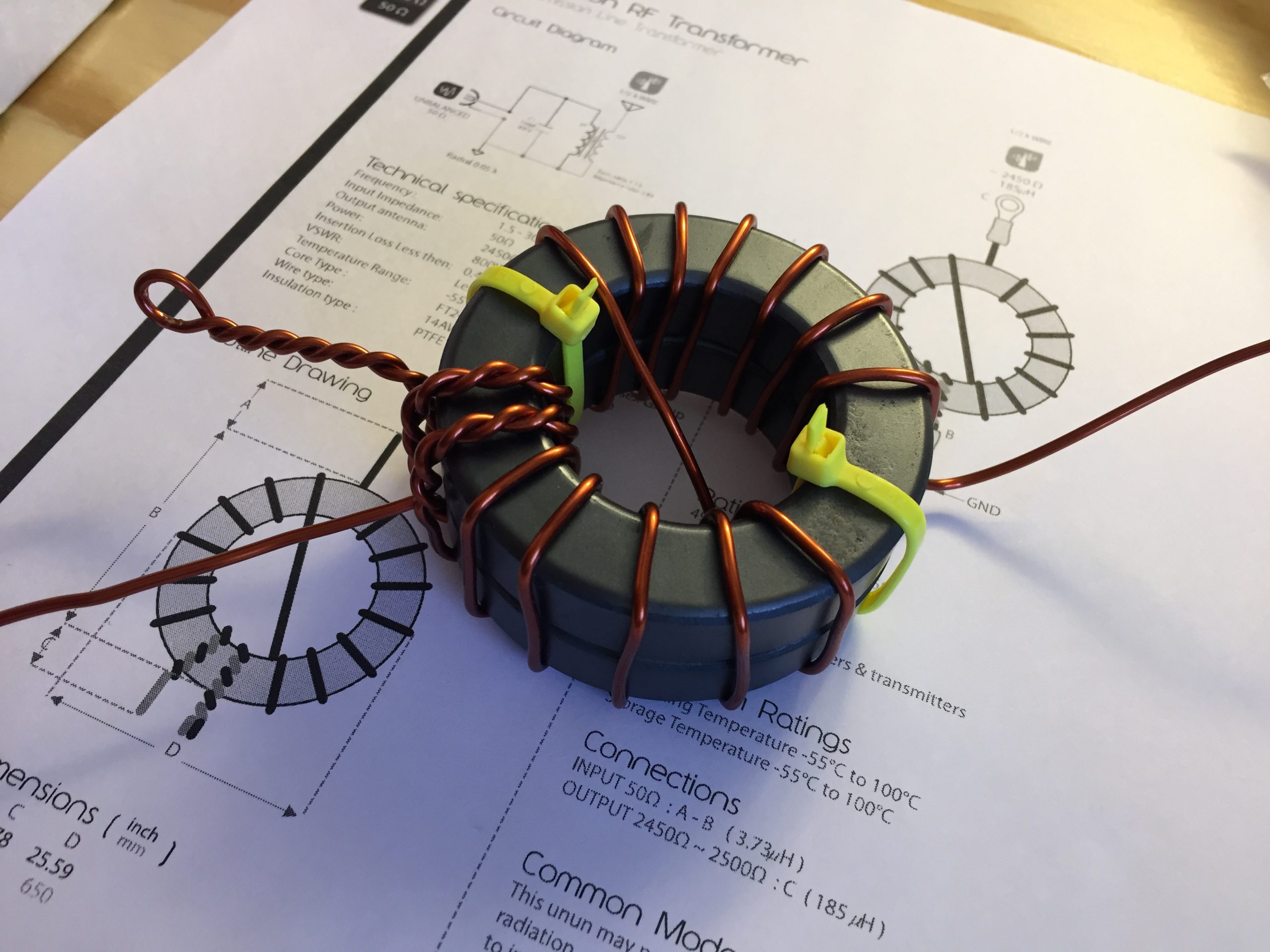
Luego de revisar experiencia práctica de entusiastas experimentadores, he considerado en este nuevo diseño el uso de 2 núcleos toroidales apilados de tipo FT240-43. Según algunos autores, la eficiencia de este transformador es superior al 80% en toda la banda de HF, cuando se le utiliza con una relación de transformación de 49:1, un capacitor de 100 pF en paralelo con la entrada y una carga resistiva pura de 2450 Ohmios. Mi idea es probar este diseño de adaptador de impedancias para utilizar esta antena con más potencia (los 100 Wpep que entrega mi FT-450D) y extender el uso a la banda de 80 metros.
Más información en este link (antena multibanda para 80/40/20/10 metros).