(Linear power supply, designed for QRPs like FT-817ND and Iler 40)
Aprovechando que el cautín estaba caliente luego de construir el QRP Iler 40 con control de frecuencia DDS, me dediqué a la tarea de elaborar una fuente de poder adecuada para este nuevo transceptor. También la pensé para mi querido Yaesu FT-817ND, con requerimiento energético solo un poco superior. Ambas radios operan a 12 [Vdc], con un consumo de corriente inferior a 3 [A], corriente tan baja que hace práctico el uso de una fuente lineal. Luego de un poco de trabajo manual, tenemos la fuente mostrada en la Fig. 1.
Fig. 1 Fuente de poder lineal, alimentando el QRP Iler 40 con sintetizador DDS.
El diseño se basa en el CI regulador lineal L7812CV, ocupando como paso para alta corriente al transistor NPN de potencia TIP35C. Este transistor debe disponer de un amplio disipador térmico.
Fig. 2 Esquemático de la fuente de poder lineal que construí para mis QRPs. Click en la imagen para ver en detalle.
Para disipar fácilmente el calor generado por el TIP35C, este transistor se instala sobre una placa disipadora de aluminio. Debemos aislar el transistor de esta placa para evitar el contacto del colector con GND (la placa disipadora está conectada a GND), a través de una lámina de mica o teflón con pasta disipadora. Monté todo el circuito al interior de una caja plástica, a la que hice varios agujeros que permiten su ventilación. Además, para forzar el intercambio de aire entre el exterior e interior de la fuente, puse un ventilador de 24 [Vdc] sin escobillas, alimentado desde el lado DC no regulado (justo a la salida del puente rectificador). Con este ventilador se logra disipar adecuadamente el calor interno de la fuente y, al operar a una tensión inferior a la nominal, su velocidad de giro es lenta, haciendo que su funcionamiento sea lo suficientemente silencioso para esta aplicación en particular.
Fig. 3 Disposición de componentes en la fuente de alimentación lineal para QRPs. Luego, con silicona caliente, fijé los cables en torno a la soldadura para evitar daños en las conexiones y contacto directo con la tensión de la red eléctrica (220 V).Fig. 4 Vista interior de la fuente de poder lineal para QRPs, lista para cerrar y ocupar.
En la Fig. 2 tenemos el esquemático, mientras que en las Fig. 3 y Fig. 4 podemos ver el interior de la fuente. Si deseas construir esta fuente, te recomiendo consideres un fusible lento 3 [A] en el lado DC, cosa que haré yo también en algún momento.
Opera perfectamente para consumos que requieran 12 [Vdc] y corriente inferior de 3 [A], y sin generar interferencia electromagnética EMI (muy común en las fuentes conmutadas que venden en el comercio). Estoy muy satisfecho con el resultado de este trabajo.
(Homebrew SSB 40 meter band transceiver, based on ILER 40 kit and DDS VFO)
Hace ya bastante tiempo que quería probar el ILER 40, kit transceptor SSB para la banda de 40 metros desarrollado por EA3GCY, pues se trata de un circuito bastante simple con muy buenos comentarios en foros de radioafición. El diseño original utiliza un oscilador local basado en cristal de cuarzo, al que se varía levemente la frecuencia a través de condensador variable (polyvaricon). Construyendo tal cual el Iler 40 obtuve un resultado bastante bueno, destacando el bajo consumo de energía (ideal para operar con baterías) y mínimo nivel de ruido (al no tener circuitos digitales, es bastante silencioso en RX). Sin embargo, el control de la frecuencia de operación no es del todo adecuado, pues el rango de frecuencias que abarca en VFO es de no más de 40 kHz (muy inferior a los 300 kHz de toda la banda) y no cuenta con una visualización de esta. Además, quiero disponer de acceso rápido a frecuencias de uso habitual, como lo son los 7.050 kHz (Frecuencia Nacional de Encuentro), 7.085 kHz (Red Nacional de Emergencias de Chile), 7.148 kHz (Rueda de la Amistad), las que quiero almacenar en memorias fácilmente reconfigurables. Otro aspecto importante es que necesito disponer de un «Clarificador» SSB, donde pueda desplazar la frecuencia RX sin afectar la de TX, para así recibir en forma adecuada aquellas estaciones que estén desplazadas en frecuencia.
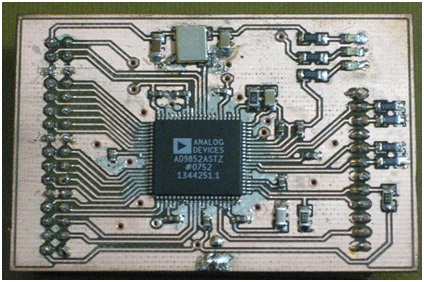
Todas estas mejoras se pueden hacer en forma rápida, sencilla y económica si utilizamos como VFO un sintetizador digital directo. En el comercio encontramos el módulo DDS basado en el chip AD9850 de Analog Devices, con un generador de reloj de 125 MHz. Como resultado, obtuve el transceptor mostrado a continuación:
Estación QRP para 40 metros, B.L.U., basada en kit Iler 40. (SSB QRP Station, 40 meter band, based on Iler 40 kit).Vista frontal del QRP
Vamos a construirlo….
Básicamente, lo que debemos construir es un sintetizador de frecuencias que cubra un rango adecuado como oscilador local. La frecuencia intermedia en TX y RX del Iler 40 es F.I. = 4.913 kHz, y a través de ensayos he observado que la frecuencia óptima de OffSet para el VFO es de 4.913,52 kHz (desviación adicional que permite óptimo ajuste al filtro para banda lateral inferior). Por lo tanto, la frecuencia de salida del VFO debe variar entre (7.000 + 4.913,52) kHz y (7.300 + 4.913,52) kHz para cubrir toda la banda de 40 metros (7.000 a 7.300 kHz). A través de la programación del microcontrolador se puede extender levemente el rango de operación, pero ya estaría fuera del rango de frecuencias para radioaficionado. Pruebas técnicas me confirman que el Iler 40 anda bien entre los 6,8 y 7,3 MHz. También es posible reducir el rango de operación a sólo aquel en que se trabaja fonía SSB.
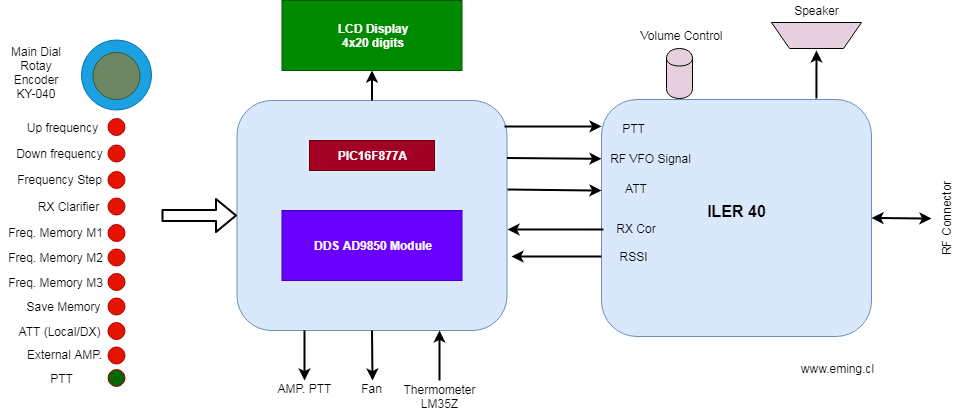
El centro de nuestro diseño será el sintetizador digital directo AD9850 de Analog Devices, el que adquirí en forma de módulo que incluye el generador de reloj a 125 MHz y filtro elíptico anti-alias. Estará comandado por el microcontrolador de Microchip PIC16F877A (mi viejo caballo de batalla). Utilizaré un display de 20×4 caracteres, pulsadores (botones) y el codificador rotatorio de bajo costo KY-040 para el dial principal.
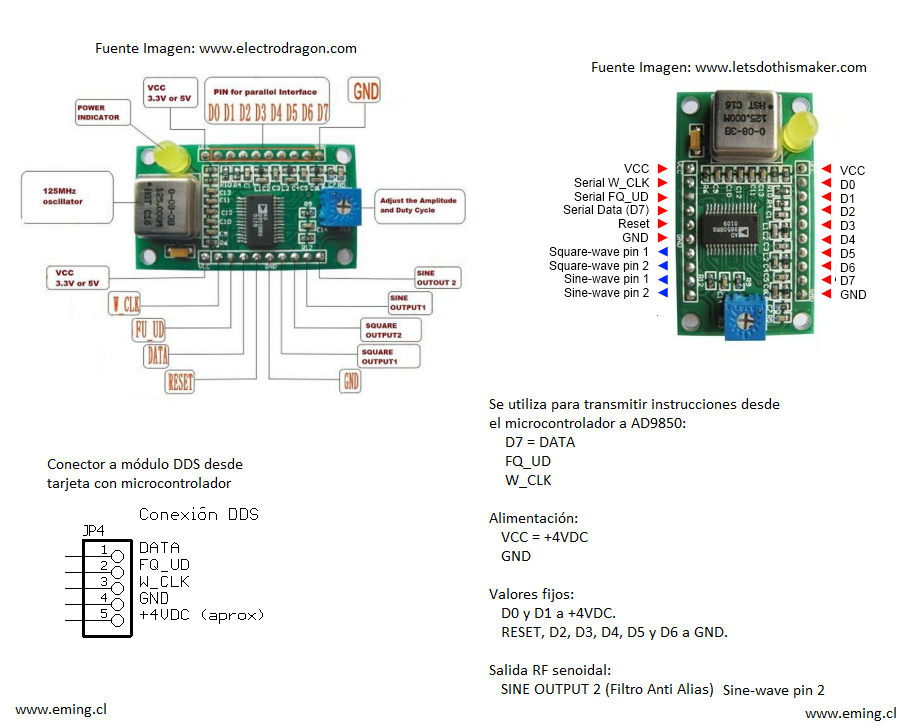
Conexiones entre Iler 40 y el hardware diseñado por mi para este transceptor (imagen extraída de mi post en inglés).
Más información sobre Síntesis Digital Directa en este link, artículo que publiqué en mi web hace algunos meses.
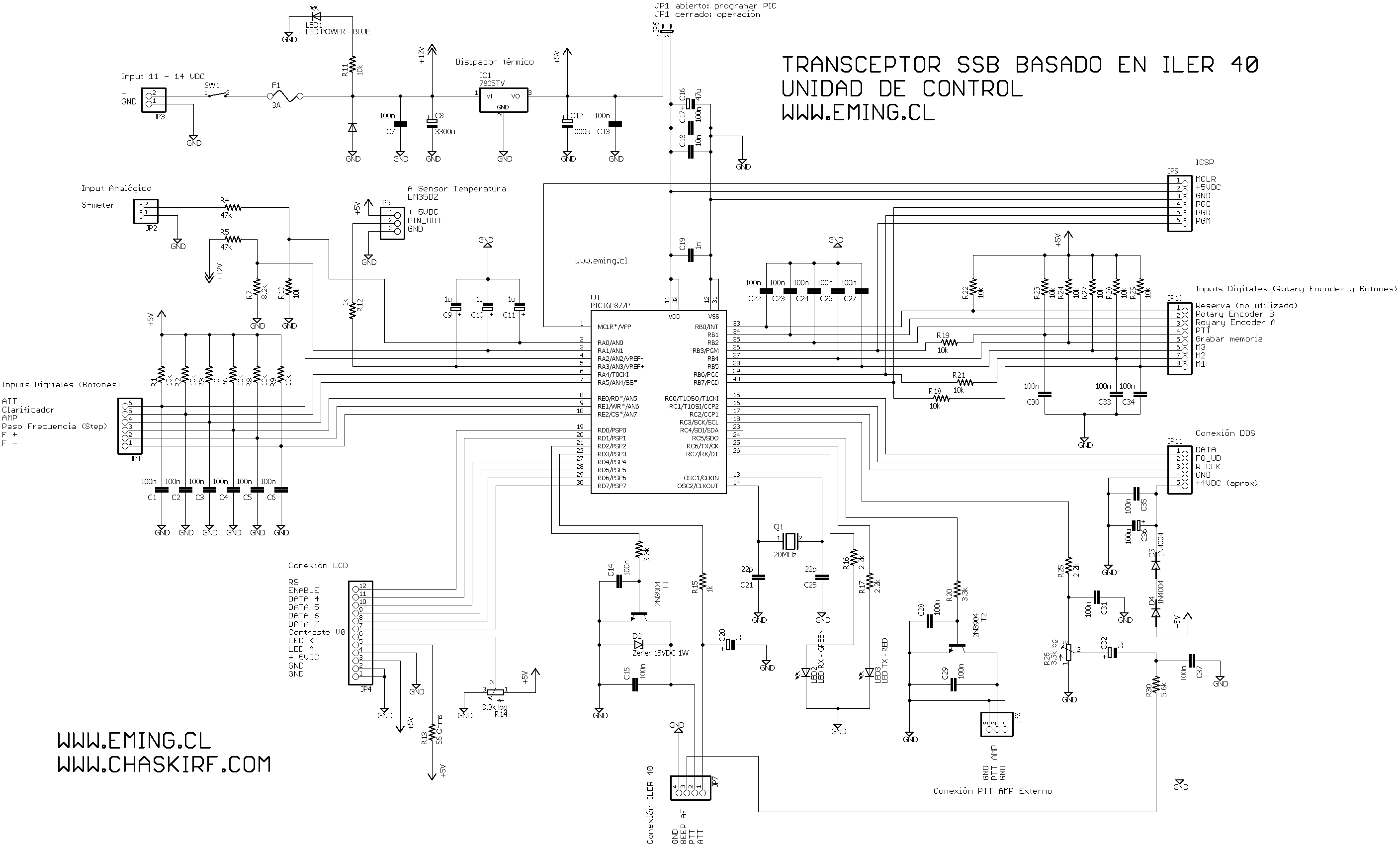
El circuito implementado es el que muestro a continuación:
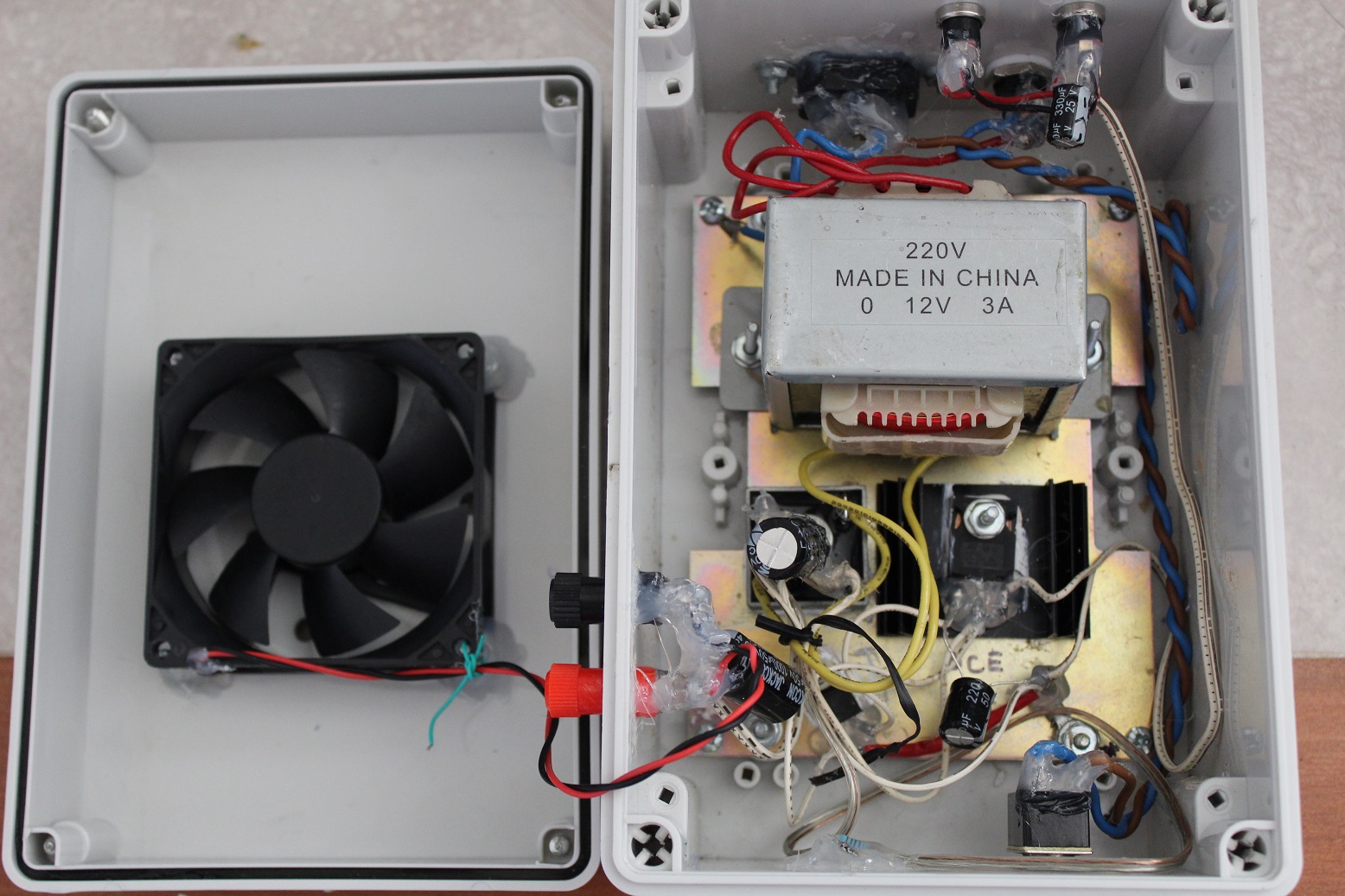
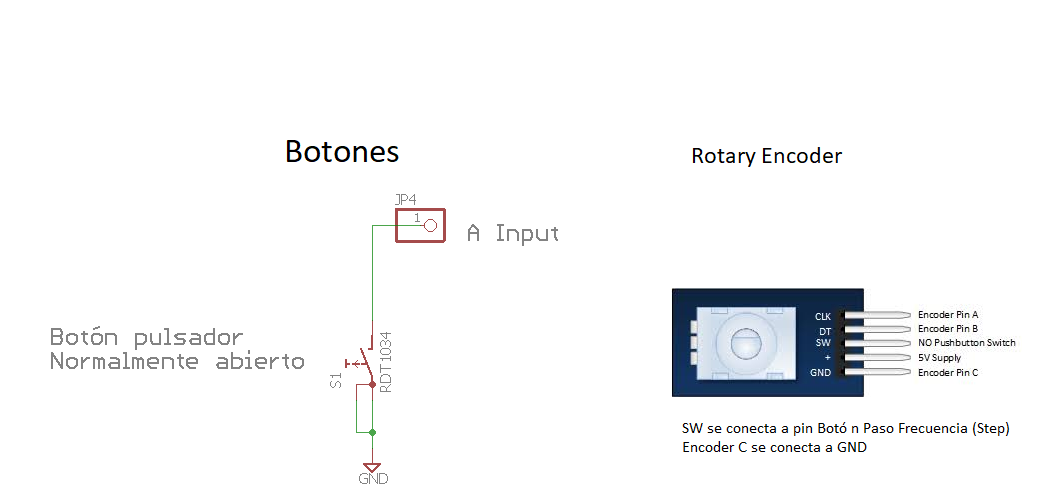
Esquemático de la unidad de control, construida en base al microcontrolador PIC16F877A y el sintetizador digital directo AD9850. (Haz click sobre la imagen para ver detalles).Conexionado botones y Rotary Encoder KY-040.Conexionado entre unidad de control y módulo DDS. Salida filtrada de RF se conecta a pin L.O. (Oscilador Local) en Iler 40. Haz click para agrandar imagen.Vista general del interior del transceptor.Tarjeta de RF Iler 40, desarrollado por EA3GCY, con PCB con circuitos necesarios para operar el Iler 40 desde el microcontrolador. Más info sobre el Iler 40, visitar la web www.qrphamradiokits.com.Instalación del transistor de salida (en este caso un 2SC2078) con un buen disipador térmico.Vista de circuitos digitales de este QRP. Se observa tarjetas con DDS AD9850 y PIC16F877A.
También construí una sencilla fuente de alimentación lineal de 12VDC 3A, a la que dispuse 2 jack de salida. Conecto este QRP en uno de estos jacks, mientras que el otro lo utilizo para el FT-817ND.
Interior de la fuente de poder lineal 12VDC 3A para QRPs.
La fuente anda bastante bien. Le puse un ventilador de 24VDC, pero alimentado directamente desde el puente rectificador (previo al regulador de voltaje), recibiendo unos 16VDC, con los que opera más lento y, por ende, menos ruidoso. El flujo de aire generado es suficiente para mantener una adecuada temperatura en la circuitería, especialmente en el transitor de paso de corriente (un TIP35C). Pronto publicaré detalles constructivos de esta fuente. ACTUALIZACIÓN: Este es el link con detalles de la fuente de poder.
Y bueno… una breve prueba RX con una antena de hilo largo. No lo hice operar en TX pues arriesgo el transistor de potencia, dada la elevada R.O.E. de esta antena. En todo caso, pruebas con carga fantasma me indican que el equipo entrega unos 4W P.E.P. sobre 50 Ohmios.
Notarás que el equipo hizo ruidos extraños cuando acerqué la cámara con que grabé este video. Ocurre porque la electrónica de RF no está apantallada (es una caja plástica!), lo que la hace sensible a ruidos electromagnéticos generados por fuentes cercanas, como mi teléfono celular.
Cuando el tiempo y el espacio me lo permitan, construiré una antena para 40 metros y les mostraré nuevos videos de este sencillo y efectivo transceptor SSB.
Si te animas a contruirlo y necesitas orientación, no dudes en escribirme.
(Chaski RF… the messenger of the Andes. Portable and autonomous radio & data repeater station. Part I)
Nace la idea de Chaski RF en el norte de Chile… para Latinoamérica y el Mundo.
Esta historia la hemos compartido muchas veces en conversaciones y charlas, y aquí la voy a contar desde el principio, incorporando algunos datos de interés técnico…
Foto 1. Salar de Tara. Lugar donde nace la idea de nuestra estación portátil. Aquí mismo la bautizamos como Chaski – en honor a los antiguos mensajeros del imperio inca (ver info en Wikipedia sobre los Chaskis o Chasquis) -.
Todo empezó en nuestras vacaciones al Norte Grande de Chile, en mayo del año 2013. Pao y yo estuvimos 10 días recorriendo San Pedro de Atacama y sus alrededores, tomando casi todos los viajes turísticos que se ofertan en el lugar. Entre ellos, un recorrido por el Salar de Uyuni – Bolivia, y el ascenso al Salar de Tara (muy cerca del límite tripartito entre Argentina, Bolivia y Chile). Fue en este lugar donde, estando totalmente incomunicados, en plena Cordillera de los Andes y por sobre los 4.000 metros sobre el nivel de mar, tuvimos una emergencia. De casualidad, encontramos una familia completa de turistas franceses – con bebé incluído -que en pleno recorrido por el altiplano, tuvieron problemas para mover su vehículo. Quedaron atrapados en uno de los lugares mas inhóspitos del planeta. La mamá de esa familia (que apenas decía unas pocas palabras en español), salió sola a buscar ayuda por el desierto. Caminó por lo menos unos 20 kilómetros en pleno altiplano, tratando de llegar a la ruta por la que suben los turistas (ruta indefinida… nada más que huellas marcadas en el árido suelo), y sólo con una botella de agua en las manos. Encontrarnos fue como dar con una aguja en un pajar, ante tanta inmensidad del paisaje y la soledad casi absoluta que reina las alturas. Más aún a esa hora, cuando ya se acercaba la noche y nos disponíamos a regresar a San Pedro de Atacama. Dado que no tenían teléfono satelital (el único medio de comunicación portátil que funciona en ese lugar), de no encontrarlos hubiesen permanecido allí durante la noche, cuando las temperatura desciende a decenas de grados bajo cero. Hubiera sido muy compleja la situación para ellos, en especial para los más pequeños, pero gracias a la Pachamama nos encontramos y la historia tuvo final feliz.
Esto motivó a que indagáramos sobre cómo resuelven sus necesidades en comunicaciones las empresas turísticas que operan en la zona – convengamos que es San Pedro de Atacama, uno de los lugares más visitados de nuestro país -. Nos encontramos con la sorpresa que, a esa fecha – año 2013-, la mayoría de las empresas no contaba con teléfonos satelitales (por costo), ni hablar de los celulares (sólo tienen servicio en zonas donde es negocio para las compañías telefónicas, por lo que descartamos áreas no pobladas ni con rutas vehiculares importantes), menos aún de comunicaciones NVIS (que tampoco es barato y su operación en estaciones móviles es compleja) y las radios VHF/UHF que traían en los vehículos no tienen cobertura entre los cerros (por falta de estaciones repetidoras). Había una necesidad de comunicaciones no cubierta.
Ante esta necesidad pensamos en construir un kit repetidor de bajo costo, al que inmediatamente bautizamos como Chaski. ¿Por qué Chaski? bueno… una reflexión habitual cuando mirábamos la inmensidad del paisaje andino era: «quizás qué bellos paisajes vieron los antiguos chasquis en su recorrido por el altiplano… cuántas hazañas por llevar información a cada rincón del reino inca». Fue inevitable imaginar una solución tecnológica hecha en Latinoamérica, capaz de cumplir esta noble labor de comunicar en estos lugares tan extremos. Crear una solución como esta sería un humilde homenaje a estos admirables hombres del mundo precolombino.
Tuvimos que incorporar «RF» (de RadioFrecuencia) para distinguirlo del concepto base en quechua, pudiendo registrarlo en INAPI. Así quedó como Chaski RF.
Logo CHASKI RF, marca registrada.
Pero… ¿qué es una estación repetidora de radio?
Es un conjunto de equipos y materiales que permiten extender el área de servicio (alcance) de los sistemas de radiocomunicaciones. Habitualmente se instalan en lo alto de cerros y montañas, o bien a nivel de las ciudades pero con grandes torres para soportar antenas, esto con el objetivo de incrementar el área de cobertura (servicio) del sistema de radiocomunicaciones.
He tenido la oportunidad de conocer diferentes estaciones repetidoras, varias de ellas instaladas en cerros bien conocidos por su buena visual hacia los valles poblados con grandes ciudades, donde existen caminos para acceso en camioneta 4×4 y hay disponible energía eléctrica (típicamente línea bifásica de media tensión). Sin embargo, cuando hablamos de sectores rurales, donde las grandes ciudades están muy lejanas, lo más común es que no haya camino vehicular hacia los cerros y tampoco de disponga de energía eléctrica en ellos. Además, estos sitios usualmente contienen ecosistemas sensibles a la intervención humana, y cada obra de ingeniería debe ser rigurosamente evaluada antes de implementarse.
Foto 2. Sitio repetidor analógico básico en cerro Macón, por sobre los 5.000 m.s.n.m. en el Valle de Chajnantor – Región de Antofagasta, Chile. Tomé esta foto en mi visita al Interferómetro Radioastronómico ALMA el año 2010, precisamente trabajando en una propuesta para un nuevo sistema de radiocomunicaciones, reemplazo del utilizado en la etapa de construcción del interferómetro.
Esto hace muy compleja la instalación en terreno de las estaciones repetidoras, siendo necesario muchas veces el uso de helicópteros para el transporte de personas, equipos y materiales; e incluso la implementación de instalación de faena (lo que aumenta el impacto ambiental y costos). Por ello, nos pareció interesante desarrollar una solución en repetidoras de radio de fácil instalación (sin obras civiles ni uso de maquinaria pesada) y autónomas energéticamente.
Primeras versiones de Chaski RF
La idea era armar una estación repetidora que en terreno fuera tan simple de instalar como una carpa para acampar. Partimos por lo más simple… nada más que un back to back entre radios portátiles. Una para up-link y otra para down-link. Solución natural al estilo del radioaficionado que soy, y de bajo costo. Lo pusimos en una caja provista de energía y anduvo bien, pero no tanto como queríamos. Faltaban funcionalidades y había detalles por mejorar en su tarea básica como repetidor de radio.
Foto 3. Primeras pruebas prototipo Chaski
Con recursos 100% propios, trabajamos en nueva electrónica. Logramos avances importantes, pero seguíamos con la sensación que podíamos mejorar la solución. Por falta de insumos, se hacía difícil seguir adelante con el proyecto.
Foto 4. Un pequeño pájaro posa sobre nuestro primer prototipo de estación Chaski RF.
Con nuestro Chaski RF básico, hicimos pruebas operacionales en la Laguna del Maule (en adelante, nuestro laboratorio natural para cada versión de Chaski RF). Poco a poco íbamos corrigiendo los detalles técnicos de la solución para radiocomunicaciones que tuvimos en un principio. La caja estaba quedando chica y necesitábamos más energía. Había que seguir avanzando.
Trabajo con Corfo y la Incubadora de Negocios de la Universidad de Concepción.
Armados con la idea básica de negocio y el prototipo simple de Chaski RF recién descrito, nos acercamos al Centro de Desarrollo de Negocios de Talca. La idea era buscar ayuda para convertir nuestro trabajo en una solución atractiva para clientes locales y también para inversionistas ad-hoc (buscamos «smart money»!!). Aconsejados por nuestro ejecutivo estrella, el ingeniero comercial y magíster en finanzas, Mario Rojas Bastías, decidimos postular a fondos Corfo (ver link sobre Corfo). Había que preparar un proyecto (buena oportunidad para aprender conceptos de negocios) y un video pitch en el cual contar nuestra idea en sólo 1 minuto.
Foto 5. Grabaciones pitch de Chaski para postular a fondos Corfo. Gran trabajo David, Vicente y Javi, y por supuesto Pao. Ella fue la artífice del guión casi en su totalidad
Con el guión de Pao, y el buen trabajo de David, Vicente y Javi sacamos el primer video relativo a Chaski. Fue nuestro pitch – hecho en tiempo record – para postular a fondos CORFO. Nuestro objetivo era conseguir co-financiamiento para desarrollar un Producto Mínimo Viable (PMV), hacer difusión y prospección comercial. A continuación, como quedó el video pitch de Chaski:
Video 1. Pitch para postular a fondos Corfo. Quedó filete! salvo pequeños errores en las gráficas. Excelente trabajo muchach@s.
Luego de un riguroso proceso de selección y una presentación estilo «Shark Tank», fuimos uno de los proyectos beneficiados por CORFO el año 2016. Con Pao, Mario y todos quienes nos apoyaron, fuimos a tomar unos vinos bien merecidos.
Durante un año completo trabajamos con el apoyo de CORFO, patrocinados por la Incubadora de Negocios de la Universidad de Concepción (Incuba UdeC). En este tiempo desarrollamos el Producto Mínimo Viable (PMV), hicimos prospección comercial y difusión de nuestra solución. Ganamos la oportunidad de presentar nuestra idea de negocio a inversionistas privados, en el contexto del Programa Alas Bio-Bío. Aunque nos fue esquivo el «match», y no encontramos el «smart money» que buscábamos, gracias al Alas Bio-Bio conocimos un poco sobre la realidad del empresariado nacional – al menos el perfil de las personas que allí participaron -. También estuvimos en ferias tecnológicas, como la Feria de Innovación y Emprendimiento de Talca (FINEM), Creo en Chile y Expo Andes (Santiago). Fue un año muy ajetreado.
Foto 6. Junto a mi compañera de aventuras Pao, con nuestro Chaski RF en la feria Creo en Chile. Santiago, junio 2017. Aquí estaba la electrónica un poco más avanzada, pero aún no teníamos el up-grade en la carcasa.
Fotos 7. Aquí estamos en la Feria de la Innovación y Emprendimiento del Maule (FINEM) junto al equipo CORFO, entre ellos (el gran) Tadashi Takaoka, entonces gerente de emprendimiento. También están Juan Eduardo y Sole (de Crescat).
Fotos 8. También en FINEM, donde aparecemos junto el team de diseñadores industriales encargados del diseño y construcción exterior de Chaski RF. Notar que tenemos una nueva presentación, pero que posteriormente fue modificada luego de algunos fallos en terreno.
Lo bueno… conocimos mucha gente buena. Gente colaborativa que cree en el valor del emprendimiento tecnológico y los beneficios que tiene para nuestra sociedad, más allá de la simple visión de negocio. Lo malo y nuestro error, subestimamos los costos y quedamos medio trasquilados.
Evolución de Chaski RF
Cuando iniciamos nuestro trabajo con CORFO, Chaski RF estaba basado en el clásico back-to-back de radios portátiles, con una pequeña electrónica de control. Gracias al co-financiamiento pudimos construir varias tarjetas electrónicas que desde hacía tiempo queríamos probar. Esas ideas – que estaban sólo como un diseño en el computador – se conviertieron en circuitos electrónicos reales. Así, después de bastante ensayo – error, logramos un buen up-grade de nuestra solución.
Foto 8. Yo en el laboratorio. Está más ordenado de lo habitual (íbamos a tomar esta foto para ponerla en un informe para CORFO… jejeje). Las ojeras salen luego de pasar muchas horas ruteando tarjetas electrónicas o programando.
Gracias al desarrollo de nueva electrónica para nuestro Chaski RF, pudimos incorporar nuevas funcionalidades:
Control inteligente de uso de energía, permitiendo que la estación tomara medidas para reducir el consumo de energía. Muy útil si no hay suficiente disponibilidad de energía fotovoltaica como para operación continua, o bien cuando hay alto tráfico de llamadas.
Sistema de alarma anti-robos. Detector de vibraciones y movimiento que alarma localmente (tono de advertencia) y remotamente (avisa a los usuarios de la estación) sobre intentos de robo. Se implementó inteligencia para operar correctamente en caso de movimientos telúricos (control de falsa alarma).
Nodo LoRa. La gran cantidad de personas y empresas que conocimos con la necesidad de transmitir datos de telemetría [de hacer Internet de las Cosas (IoT)], nos motivó a incorporar un módulo LoRa a Chaski RF. Así, podremos extender el área de servicio de las redes que permiten transmitir los datos desde sensores remotos hacia servidores, y también desde estos hacia actuadores. Por ejemplo, podemos comunicar estaciones meteorológicas, letreros LED de caminos, entre otras cosas.
Una de las características interesantes -a mi gusto-, y que responde más a un deseo personal que a resolver una necesidad práctica, es la funcionalidad de «Beacon» (baliza) que posee Chaski RF. No me refiero a la clásica baliza de luz intermitente (cosa que también tiene, y que según sea la aplicación puede ser conveniente configurar para que se active automáticamente durante la noche), sino que a un beacon en RF. Gracias a esta funcionalidad, podemos configurar el equipo para que cada cierto lapso de tiempo (sin tráfico) configurable (5 minutos, 15 minutos, 30 minutos, 1 hora o 12 horas), emita un mensaje de voz pregrabado en un archivo digital y/o una secuencia de caracteres en MCW (CW modulado – tono codificado en morse, muy típico en comunicaciones de radioaficionados, el cual puede contener información operacional de equipo como temperatura, nivel de batería interna y disponibilidad de energía solar). Es una señal que envía Chaski RF, pensada para cuando se le instala en lugares en extremo aislados. Me lo imagino en pleno desierto, o entre los canales del sur… con las frecuencias publicadas en carreteras y parques nacionales, indicando cada cierto tiempo – «este es el sistema de comunicaciones para emergencias de…» -… Escuchar por la radio una voz humana en lugares tan remotos sin duda que reconforta.
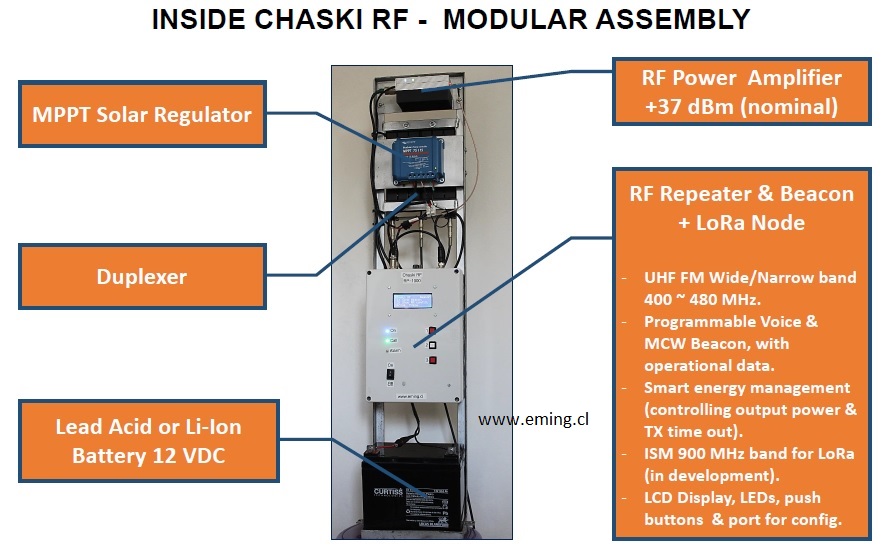
Luego de unos cuantos diseños previos, así quedó la electrónica interna de Chaski RF:
Foto 9. Vista interior de la estación repetidora Chaski RF. Se observa ensamblaje modular para facilitar cambio de partes y piezas. Cuenta con un display y puerto COM para conexión a PC, de modo de que podemos configurarlo en terreno.
Y esta es la primera foto de su portadora, vista en el analizador de espectro:
Foto 10. ¡Habemus portadora! vista al analizador de espectro de la portadora emitida por Chaski RF (señal atenuada 40 dB).
Y bueno… había que hacer un up-grade en la carcasa…
Foto 11. Versión actual de Chaski RF.
El diseño exterior no es tan simple como parece. Debe responder a exigencias propias de estos sistemas, como:
Oscilaciones térmicas extremas: el equipo debe ser capaz de soportar temperatura ambiente entre los -20°C y 45°C, sin dañar la electrónica ni batería interna. Esto es muy importante, pues las baterías son muy susceptibles a daño por alta temperatura, y si es muy baja reducen dramáticamente su rendimiento. Por otro lado, la electrónica genera un poco de calor que debe ser adecuadamente disipado para evitar daños en componentes semiconductoras.
Soportar altos niveles de radiación solar directa, como ocurre durante los calurosos veranos.
Las partes metálicas deben ser resistentes a la corrosión, particularmente elevada en ambientes salinos (borde costero, territorio insular y zona de salares).
Resistencia metálica adecuada para enfrentar el viento y peso de la nieve. Este aspecto es muy relevante, pues Chaski RF no considera obras civiles que afiancen su anclaje al suelo. Cuenta con sistema de contravientos y estacas especialmente diseñadas para suelos rocosos. También está pensada para soportar el peso de la nieve, pero no para resistir avalanchas. Se debe escoger bien el sitio de instalación.
Foto 12. Prueba básica de resistencia mecánica de la estructura hecha por el team de diseñadores industriales de Chaski RF. Hay hartos kgs ahí… y la carga dinámica hace que esta sea una real prueba de fuego!.
Para satisfacer estas exigencias, contamos con el apoyo de un equipo de diseñadores industriales. En la foto, parte de este team en acción. Ojo que previo a estas pruebas, hubo memorias de cálculo para reducir riesgos, jejeje.
Primera pruebas en terreno de la versión actual.
El montaje en terreno lo hicimos a pulso… tal como está pensado que se haga normalmente por parte del cliente. Nos acercamos en vehículo lo más que pudimos, y luego a «tracción humana» llevamos todo lo necesario. Escogimos un pequeño cerro, ubicado en el borde de la Laguna del Maule, por su buena visual hacia gran parte de la laguna y carretera internacional. Éramos 5 personas en esta faena. Entre 2 llevamos las mochilas «Chaski RF» con la estación «plug & play», otro llevaba el «cocaví», y los otras dos personas las herramientas y radios portátiles. Una vez en el sitio, lo montamos y salió al aire de inmediato.
Si bien llegamos exhaustos, no nos podemos quejar… es un lugar maravilloso. Es la mejor oficina para trabajar!!.
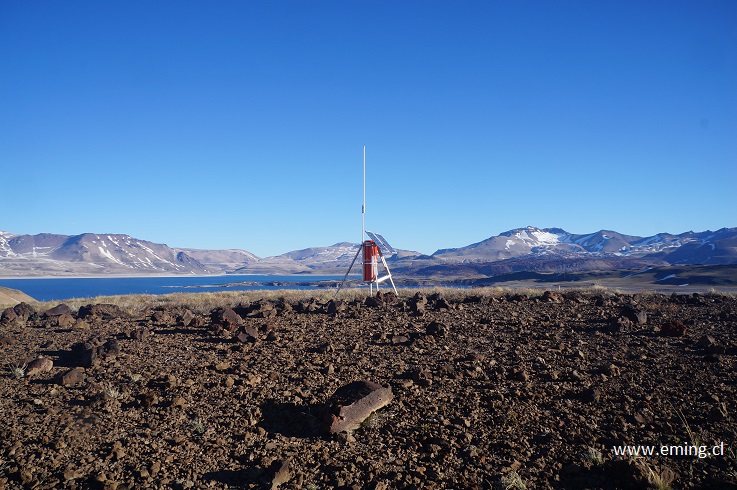
Foto 13. Lugar de instalación de Chaski RF para pruebas. Realmente de sobrecogedora belleza… y clima extremo. Un amigo geólogo nos comenta que es un centro volcánico potente.
Utilizamos la banda de 400 MHz, con una separación entre up-link y down-link de 5 MHz. Potencia de transmisión variable entre 1W y 5W, determinada por la lógica interna de operación. Para efecto de las mediciones, nos seguramos de mantener 5W (+37 dBm).
Una vez instalada la estación Chaski RF, uno de los integrantes del equipo se quedó con una radio, mientras que yo salí a recorrer la ruta con otra radio portátil (potencia TX de 4W y 0.3uV a 12dB SINAD en RX, antena portátil básica de 1/4 de onda). Hicimos pruebas de comunicacion en varios puntos, tomando coordenadas y marcando en el mapa el resultado más desfavorable en la comunicación (up-link o down-link). El resultado se observa a continuación:
Figura 1. Prueba de cobertura radial.
En la figura 1 se ha comparado el desempeño real del equipo, versus una simulación de propagación realizada con el software Radio Mobile (modelo de Longley – Rice, muy utilizado por colegas radioaficionados y estudiantes universitarios). Los parámetros de propagación se ajustaron para representar de manera adecuada el área de servicio observada. El modelo computacional se aproxima de buena forma a la realidad.
Pruebas como esta las repetimos en distintos lugares de la región, todas con éxito. En la última realizada, falló el amplificador de potencia del equipo por error de manipulación (lo hice operar sin haber conectado la antena, produciendo excesiva R.O.E., con lo que quemé el MOSFET de potencia de RF). Recordaré incorporar la electrónica para evitar que el equipo transmita cuando no tiene antena o esta esté desajustada. Tarea pendiente.
Video promocional
Casi terminando el proyecto con CORFO, con la dirección de Manuel Meza [de la productora ProImagen (del Maule)], y por supuesto el apoyo de todo su equipo, grabamos este video promocional. Quedó buenísimo, aunque confieso que algunas ideas de Manuel que no tomamos en ese momento, ahora vemos que hubieran sido buenas para los objetivos de este video. Los invito a verlo y a compartir!!.
Video 2. Spot promocional de Chaski RF. modelo RP-1000A. Quedó buenísimo. Excelente trabajo muchach@s.
Decidimos bautizar como Chaski RF modelo «RP-1000A» a esta estación repetidora de radio, y Chaski RF modelo «RP-1000AD» en caso que considere la funcionalidad LoRa. Esto porque a futuro tenemos pensado crear nuevos productos Chaski RF. Te invito a visitar el sitio web de esta solución en telecomunicaciones: www.chaskirf.com
A nuestras familias, por la empatía y buena disposición a colaborar.
A Mario Rojas Bastías, ingeniero comercial y magíster en finanzas. Por lejos, el mejor profesional del área financiera que conozco. Agradecimiento extensivo al Centro de Desarrollo de Negocios de Talca. A Andrea por su graaan ayuda con los trámites tributarios. A David, Vicente y Javi, por el bacán video pitch; y a Manuel, Maco y equipo, por el excelente video promocional. A Beatriz, Paula, Carolina, Oscar y Carlos, por el apoyo y buena onda desde IncubaUdeC. A Javier por su buen sentido de responsabilidad y experticia en la programación en JAVA de Raspberry Pi. A Aldo Aspilcueta y Paulo, por los buenos consejos sobre como emprender.
A CORFO por ayudar a democratizar las oportunidades, y por supuesto a tod@s quienes creen en l@s emprendedor@s tecnológicos.
Reflexiones, parte I.
Estoy leyendo un libro del físico chileno César Hidalgo, llamado «Why information grows?» («El triunfo de la información» es la versión en castellano), donde hace referencia a que el desarrollo industrial de un país es un indicador que puede entregarnos una idea del know how de sus ciudadanos, acumulado en empresas individualmente y en redes de estas. Conectando aquello con la realidad productiva y laboral de nuestro país, donde la mayoría de los cargos de ingeniero se enfocan en gestión, mantenimiento o a lo más en integración de tecnologías (es lo más ingenieril que me ha tocado conocer en la gran industria – en nuestro país sólo he conocido PYMES que se dedicaban a la manufactura electrónica, tarea que claramente demanda mayores conocimientos de ingeniería -), se hace de manifiesto que mucho conocimiento de ingenieros recién egresados y entusiastas por la especialidad electrónica, con el tiempo se pierde entre tareas que otra persona – sin formación técnica especializada, o con formación muy básica – podría hacer igual de bien en su lugar, desperdiciando la formación entregada por las universidades y, en algunos casos, frustrando profesionalmente a los egresados. Finalmente es tiempo, recursos y energía de gente joven que habitualmente se pierde en tareas administrativas que poco valor aportan a la actividad económica que desarrollan (o al menos que cualquier persona no técnica podría hacer en su lugar, obteniendo el mismo resultado).
Si bien hay esfuerzos que apuntan en la dirección de mejorar nuestra capacidad en I+D+i, como los que hace la CORFO y algunas pocas universidades (mi respeto a la U. de Chile con su SUCHAI y el AMTC), creo que el mundo privado está muy al debe en este aspecto. Espero que como sociedad seamos capaces de salir de nuestra dependencia de las típicas empresas dedicadas a la extracción de materias primas o a servicios de bajo valor agregado, y nazca una nueva generación de empresarios que apuesten por la innovación con base tecnológica. Necesitamos ese up-grade mental en Chile y Latinoamérica. El primer país que lo haga será punta de lanza para que nuestra región florezca.
(Low pass filter for 80 and 40 meters HF bands – 5 poles, first try)
Un amplificador de potencia ideal sería aquel en que, para una señal de entrada dada, la señal de salida tiene una forma de onda tal que se puede expresar de manera exacta a través de la multiplicación de un valor escalar por la señal de entrada. Sin embargo, los amplificadores tienden a inducir distorsión en la señal de salida, generando espurias por intermodulación (presentes cuando se aplica más de una frecuencia de entrada al amplificador de potencia) y componentes armónicas (múltiplos enteros de la frecuencia fundamental – portadora -).
Estas distorsiones se deben a no linealidades en el comportamiento del amplificador, causadas por: no linealidades en la respuesta amplificadora de los dispositivos semiconductores – MOSFET o BJT -, saturación del amplificador, componentes comportándose en forma asimétrica en ambos semiciclos de la señal de entrada, saturación de transformadores de RF o choques, etc.. Amplificadores tipo push-pull (o en contrafase) tenderán a generar menos distorsión debido a la simetría en su operación, versus aquellos que poseen un único dispositivo semiconductor de salida.
Ahora bien, como no existe el amplificador ideal, en nuestros equipos transmisores necesariamente debemos implementar filtros que mitiguen estas espurias. A continuación un primer intento en la construcción de filtros pasa bajos para transmisores en la banda de 40 y 80 metros (HF).
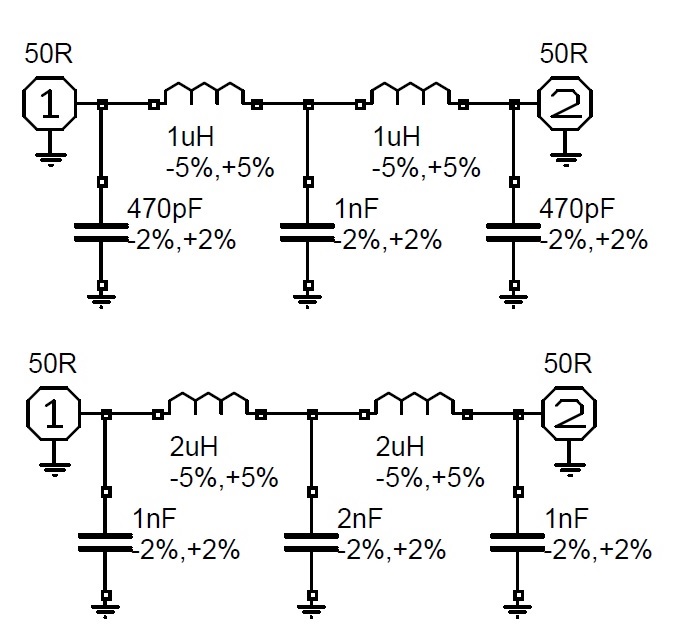
Vamos a nuestro primer intento de filtro para las bandas de 80 y 40 metros. Simulaciones en RFSIM.
El diseño para 40 metros está basado en el filtro de 5 polos que utiliza el kit ILER 40. Para 80 metros, se mantuvieron las mismas reactancias capacitivas en inductivas del filtro anterior, pero calculadas para esta banda, resultando en la multiplicación en un factor x2 de capacitores e inductores (los condensadores de 940pF los consideré de 1nF) . Utilizaremos la herramienta RFSIM para simular el comportamiento de estos circuitos.
Figura 1. Filtros a simular en RFSIM.
En las gráficas siguientes tenemos escala lineal en el eje X, correspondiente al eje de la frecuencia, mostrando el rango comprendido entre 1 kHz y 30 MHz. En el eje Y, tenemos escala logarítmica (dB), donde en rojo apreciamos el parámetro de transmisión S12 (o S21 – es simétrico, pues dá lo mismo cuál puerto es entrada o salida en estos filtros pasivos, con igual impedancia característica en ambos puertos -) y en azul el parámetro de reflexión S11 (o S22, por la misma razón recién mencionada). Estos parámetros dependen de la frecuencia y corresponden a la proporción (expresada en dB) de la potencia que pasa a través del filtro (S12) o la que se refleja (S11), respecto de la potencia total inyectada al filtro.
Figura 2. Respuesta simulada del filtro para 40 metros. Click para aumentar imagen.
De acuerdo a la figura 2, El filtro para 40 metros tiene respuesta prácticamente plana para el rango de frecuencias comprendido entre 6 MHz y 8.5 MHz, con atenuación de transmisión S12 inferior a 0.25 dB y parámetro de reflexión inferior a -15 dB. La frecuencia de corte (-3 dB) está a 9.9 MHz. A 14 MHz tenemos atenuación del orden de 25 dB, a 21 MHz de 44 dB y a 28 MHz de 58 dB. Bastante bien.
Figura 3. Respuesta simulada del filtro para 80 metros. Click para aumentar imagen.
Por otro lado, el filtro para 80 metros tiene respuesta prácticamente plana para el rango de frecuencias comprendido entre 3 MHz y 4.2 MHz, con atenuación de transmisión S12 inferior a 0.05 dB y parámetro de reflexión inferior a -20 dB. La frecuencia de corte (-3 dB) está a 5 MHz. A 7 MHz tenemos atenuación del orden de 25 dB, a 10.5 MHz de 44 dB y a 14.5 MHz de 60 dB. Muy bien.
Y ahora, a construir.
Entre mis componentes tengo algunos toroides tipo T130-2, adecuados para trabajar hasta 10 MHz. Con estos toroides podemos construir filtros que soporten 500W P.E.P. sin problemas. También encontré condensadores cerámicos de alto voltaje (1 kV) de diversos valores. Si bien este tipo de condensadores no es ideal para aplicaciones en RF, por presentar pérdidas no despreciables en dieléctrico al operar en el rango de las radiofrecuencias y por la alta dependencia de su capacitancia con la temperatura, los voy a utilizar de todas maneras a modo de ensayo. La idea es siempre aprovechar lo que hay a mano para experimentar.
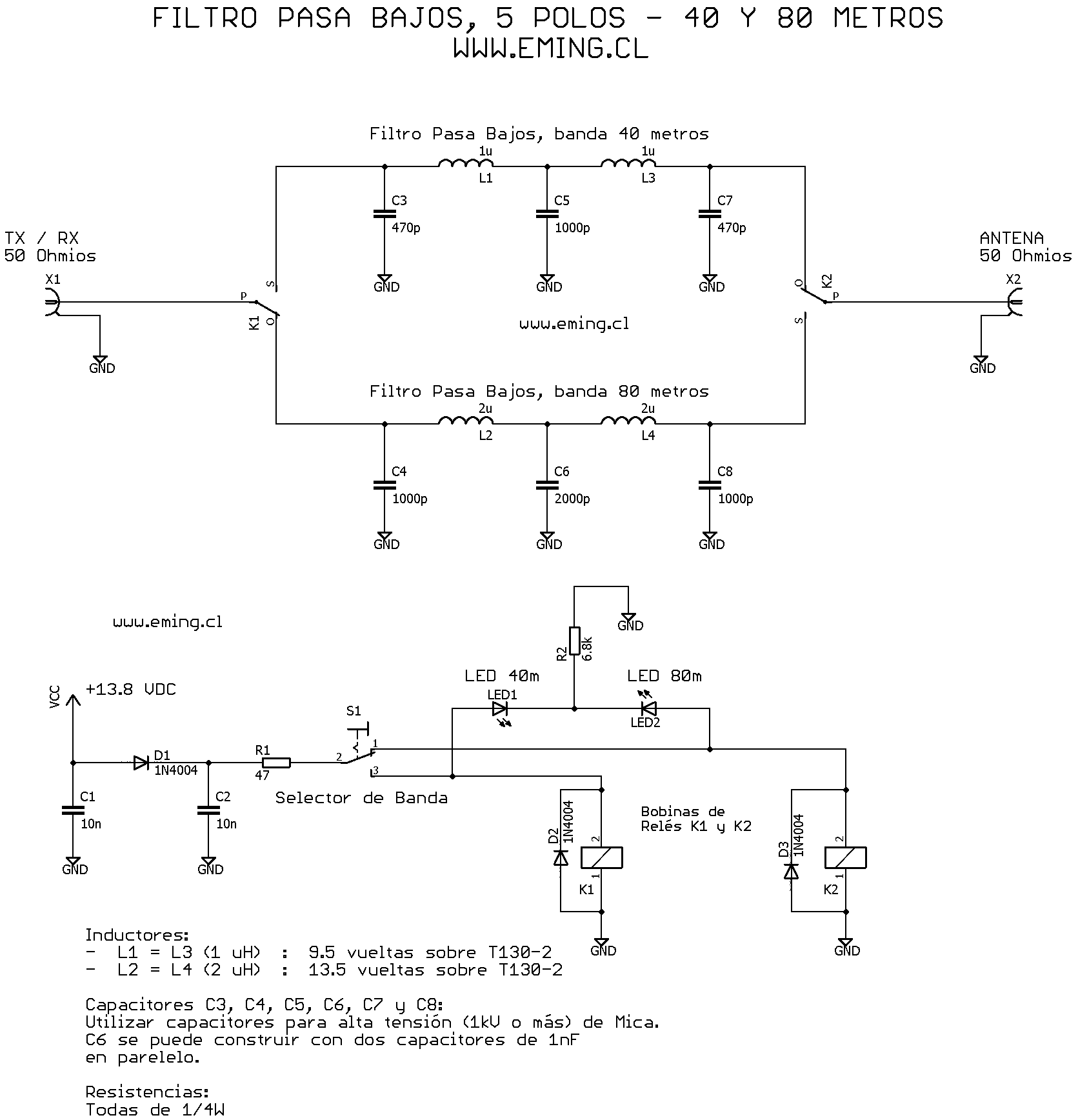
El circuito se muestra a en la figura 4.
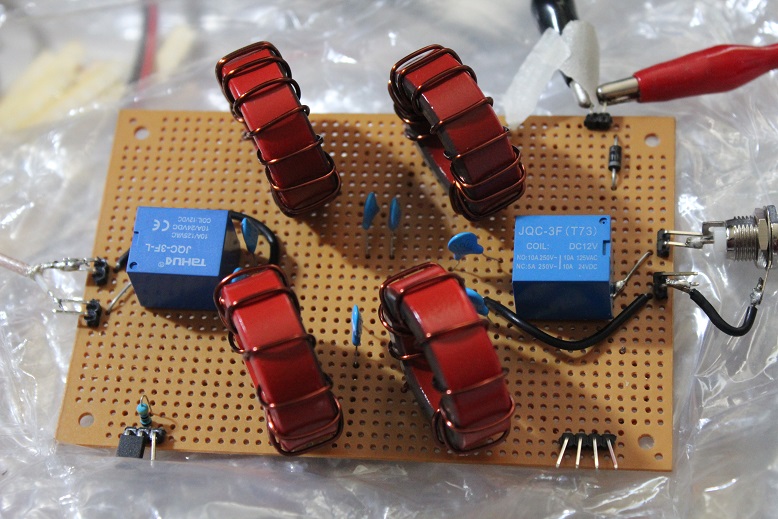
Figura 4. Circuito con filtro pasa bajos para bandas de 80 y 40 metros, de 5 polos.
El filtro requiere alimentación 13.8 VDC, y consume del orden de 30 mA, dados por la corriente del bobinado del relé activo y LED indicador de banda.
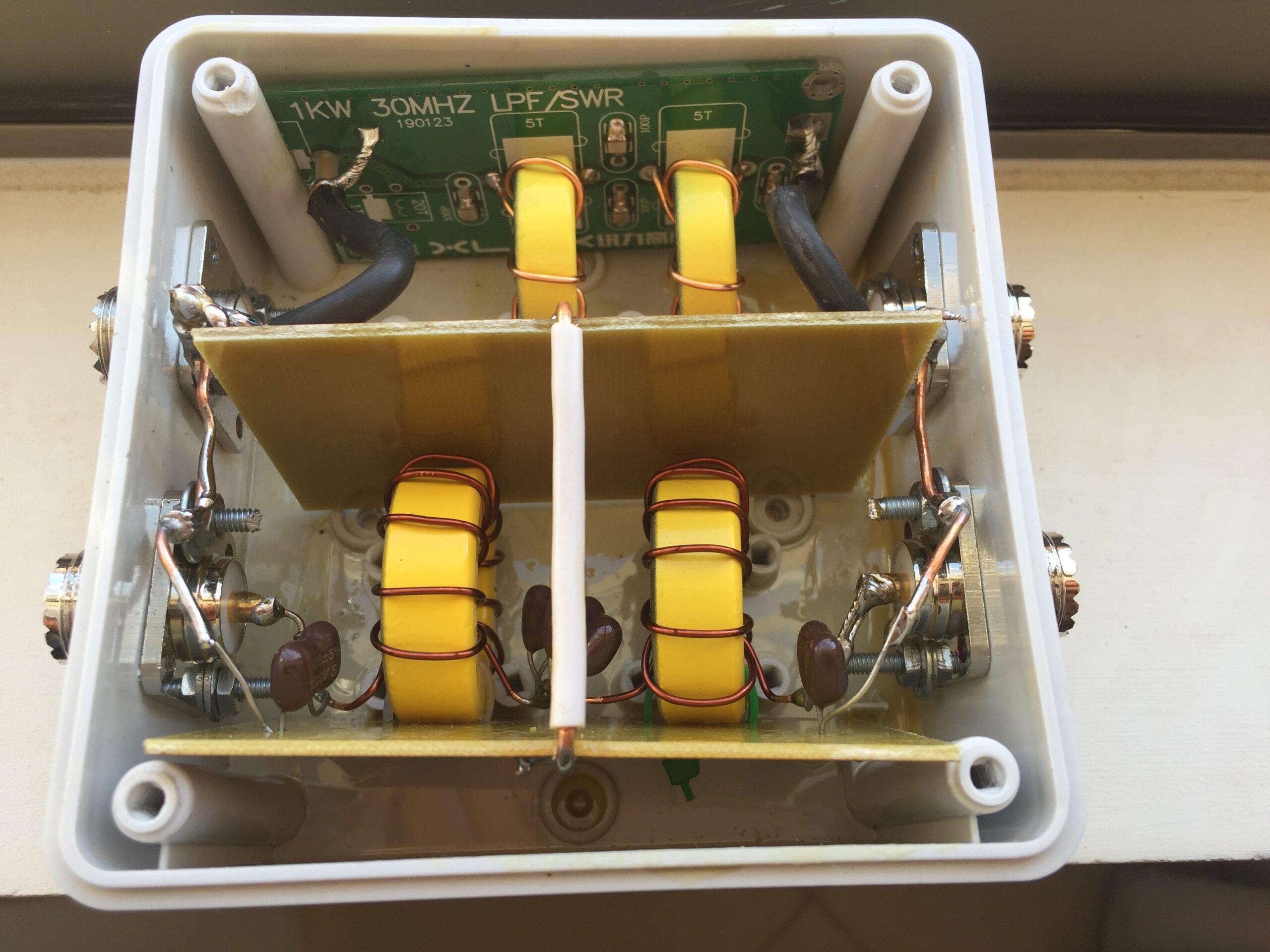
En la foto 1 vemos una vista general de esta primera versión de filtro pasa bajos bi-banda, para 80 y 40 metros. Está armado sobre un PCB pre-perforado, dejando las mayor parte de las conexiones a través de conductores soldados, lo más cortos posible. Si bien no es la mejor forma de construir PCBs de RF (recordemos que en RF se hacen relevantes las capacitancias e inductancias parásitas, afectando el desempeño del circuito), me he tomado la libertad de hacerlo así pues está pensado en operar sólo en las «bandas bajas» de HF, como lo son 40 y 80 metros. El frecuencias más altas, el efecto de estas capacitancias e inductancias parásitas se hace muy relevante.
Foto 1. Filtro construido para mediciones.
Los inductores (bobinas) se construyen de acuerdo a las indicaciones del fabricante de los toroides (ver toroids.info), donde tenemos la siguiente relación:
Ecuación 1. Cálculo de inductancia de bobinado sobre toroide T130-2.
De la ecuación 1 podemos obtener que para un L = 1 uH, N = 9.5 vueltas. En la foto 2 vemos esta bobina lista.
Foto 2. Inductor 1uH sobre toroide T130-2, utilizado para filtro pasa bajos banda de 40 metros.
Asimismo, para la L = 2 uH, N = 13.5 vueltas. Podemos apreciar esta bobina en la foto 3.
Foto 3. Inductor 2uH sobre toroide T130-2, utilizado para filtro pasa bajos banda de 80 metros.
Estos enrollados fueron construidos con hilo esmaltado 18 AWG.
Los resultados.
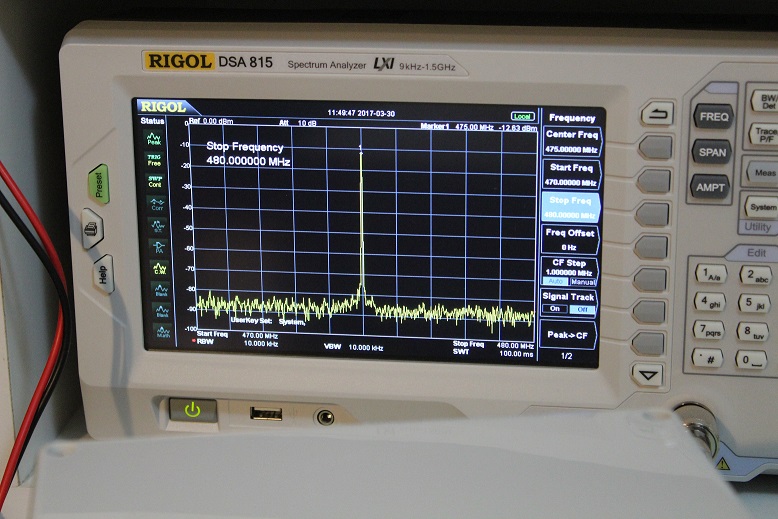
Llegó la hora de la verdad… pongamos el circuito de la foto 1 al analizador de espectro con generador de tracking. En las figuras 5 y 6 tenemos los resultados de ambos filtros.
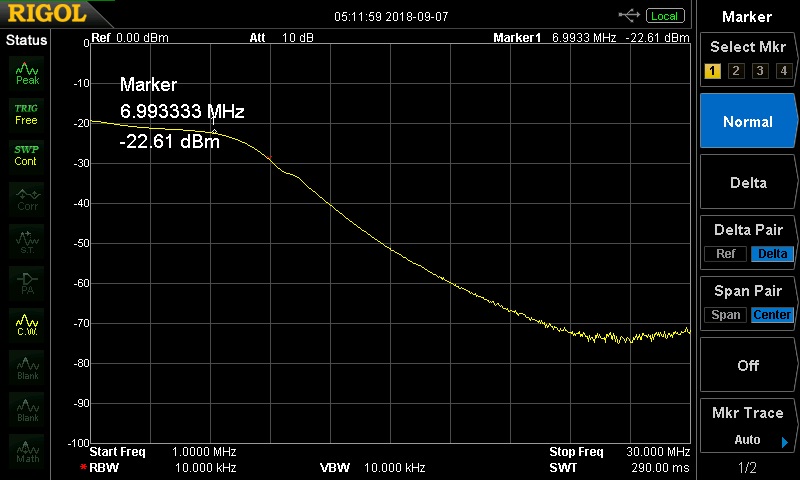
Figura 5. Respuesta de filtro para banda de 40 metros.
Para 40 metros, vemos que dentro del rango 6.990 kHz y 7.330 kHz el rizado es inferior a 1 dB, pero sin embargo observamos atenuación entre 2 y 3 dB. Esto puede deberse al tipo de condensadores utilizados y al rango de tolerancia de las componentes (especialmente los inductores, que posiblemente son de más de 1 uH). A 14.3 MHz la atenuación es del orden de 25 dB, a 21 MHz de más de 45 dB, mientras que a 28 MHz de 50 dB.
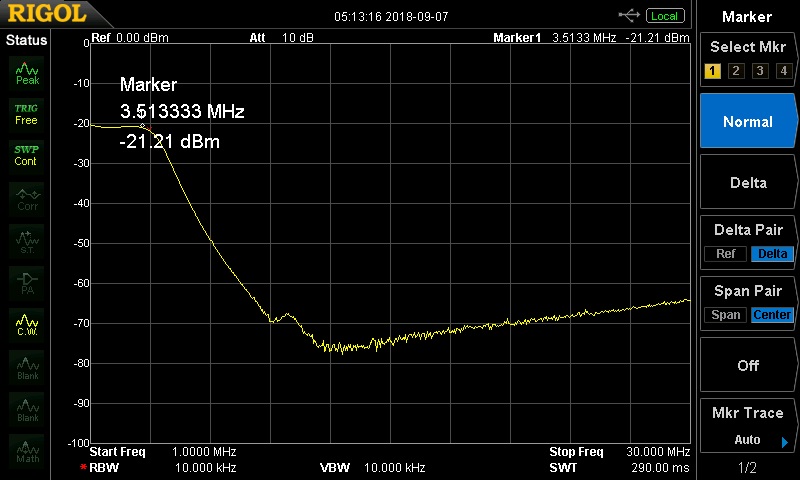
Figura 6. Respuesta de filtro para banda de 80 metros.
En el caso del filtro para 80 metros, vemos que dentro del rango 3.500 kHz y 4 MHz el rizado es inferior a 1 dB pero, al igual que en el caso anterior, observamos atenuación entre 2 y 3 dB. A 7 MHz la atenuación es del orden de 30 dB, a 10.5 MHz de más de 45 dB, mientras que a 14.5 MHz de 55 dB.
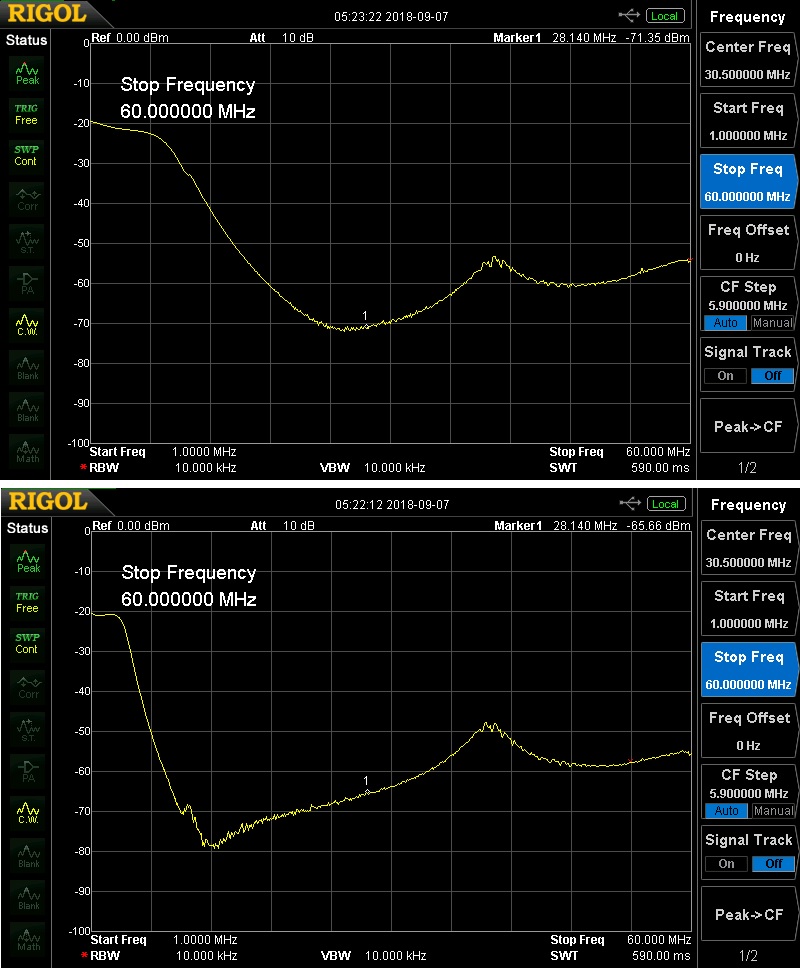
A medida que incrementamos la frecuencia, observamos que la atenuación tiende a ser menor (ver figura 7). Esto se debe a que los acoplamientos capacitivos se hacen más significativos, predominando capacitancias en serie. Para reducir este efecto, será conveniente apantallar cada etapa del filtro (por ejemplo, poniendo placas de aluminio conectadas a tierra GND entre los inductores toroidales).
Figura 7. Respuesta observada en el rango 1 kHz a 60 MHz.
A lo largo del rango de frecuencias analizado, vemos máximos y mínimos de atenuación, dejando en evidencia ciertas resonancias en el circuito.
Conclusión
La respuesta en frecuencia del circuito físico es diferente a la simulada, resultado esperable porque las componentes reales tienen valores de inductancias y capacitancias diferentes a las ideales. Por otro lado, las inductancias tienen capacitancias parásitas relevantes a la frecuencia de operación.
Otro aspecto importante es la alta atenuación del filtro dentro de las bandas de interés. Se han medido entre 2 dB y 3 dB. En otra oportunidad, quiero probar el filtro con potencia, para ver si esta atenuación se debe a los capacitores cerámicos (debieran ser de mica). Operando el filtro con unos 300W en CW, y tomando imágenes térmicas podremos descubrir dónde está la pérdida de potencia.
En resumen, está bastante bueno el filtro, pero si lo quieres construir te recomiendo utilizar capacitores de mica y apantallar los toroides entre sí.
Si lo construyes, agradecería me comentes cómo te ha funcionado.
Saludos
Emerson Sebastián
ACTUALIZACIÓN 22/02/2021
Por restriciones de espacio, en casa puedo operar desde la banda de 40 metros hacia arriba en forma eficiente, lo que me motiva a construir filtros para 40 y 10 metros. Para 10 metros hay un kit relativamente barato en Ebay, el que decidí adquirir, mientras que para 40 metros decidí construir un filtro con capacitores mica-plata y toroides T130-6. Los resultados de mi diseño son satisfactorios, mientras que el filtro adquirido queda un poco al debe.
Figura 8. LPF para 40 y 10 metros.
En cuanto disponga de tiempo para ello, publicaré mis resultados.
En este artículo escribo sobre lo que es una verdadera maravilla tecnológica, gracias a la cual hoy podemos hacer sintetizadores de señal de gran versatilidad, precisión y estabilidad con hardware reducido. Es el llamado Sintetizador Digital Directo (o Direct Digital Synthesizer DDS).
Foto 1. Mi primera tarjeta DDS. Elaboré este header para el chip AD9852 de Analog Devices (año 2009).
Esta modalidad de síntesis de señales poco a poco ha ido reemplazando a los clásicos circuitos PLL (lazo enclavado en fase), debido a su mayor capacidad de resolución en frecuencia y fase (y también de amplitud en algunos modelos de DDS). Gracias a estas cualidades es posible construir en forma más sencilla transmisores de gran estabilidad, receptores de precisión para instrumentación y moduladores para señales complejas como QAM, entre otras cosas.
Analizaremos brevemente aspectos teóricos de su funcionamiento y finalmente veremos cómo construir uno para nuestro uso en experimentación. Al final de esta página podrás encontrar los links de descarga con toda la información necesaria para que hagas tu propio oscilador local DDS, basado en el módulo AD9850 @ 125 MHZ..
Ahora bien… ¿Cómo funciona un sintetizador digital directo? veamos un poco de teoría…
Oscilador Numéricamente Controlado (NCO)
El corazón del proceso de síntesis digital directa es el llamado Oscilador Numérico Controlado (NCO por sus siglas en inglés). A continuación describo brevemente como opera:
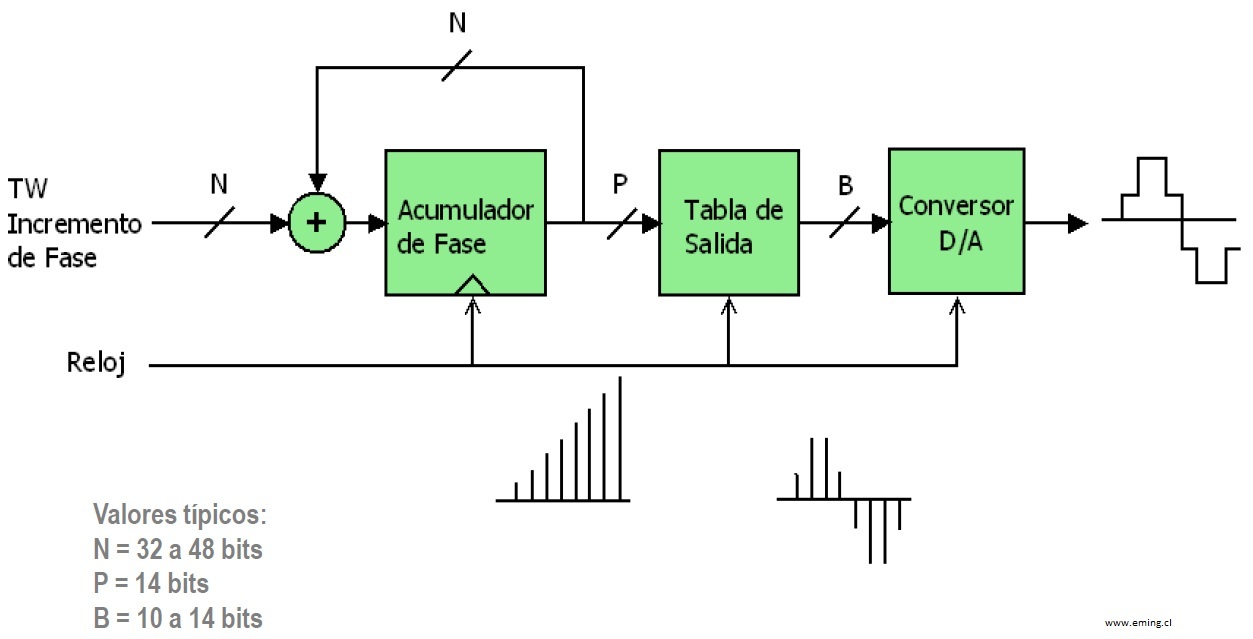
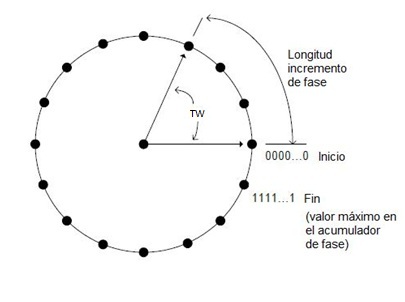
Vamos a la figura 1. Un registro (número) de N bits, llamado acumulador de fase, con cada ciclo de reloj se incrementa en un cierto valor que denominaremos incremento de fase TW. El acumulador de fase puede tener un valor – expresado en números decimales – entre 0 y 2^N – 1 (2 elevado a N, menos 1). Este incremento periódico del valor numérico contenido en el acumulador de fase hará que luego de determinada cantidad de ciclos de reloj alcance su valor máximo 2^N – 1. Mientras mayor sea el valor de TW, se requerirán menos ciclos de reloj para llegar al valor máximo del acumulador de fase, el cual una vez alcanzado hace que el valor del acumulador de fase vuelva a reiniciar a la siguiente suma de TW (siguiente ciclo de reloj). Podemos hacer la analogía entre el acumulador de fase y el ángulo de un fasor que gira a incrementos constantes TW (ver figura 2), donde 0° es el valor numérico 0 y cuyos 360° equivalen a un valor 2^N (ver figura 2).
Figura 1. Esquema básico de un oscilador numéricamente controlado (NCO), bloque fundamental de un DDS.Figura 2. Analogía entre el contenido del acumulador de fase de N bits (2^N puntos completan la circunferencia), y un fasor que gira a pasos de longitud TW.
Si en el bloque denominado tabla de salida (figura 1) a cada valor contenido en el acumulador de fase asociamos un determinado valor de amplitud, por ejemplo una sinusoide, tenemos un oscilador digital sinusoidal. En la práctica, a cada valor contenido en el acumulador de fase se le considera una dirección de memoria apuntada hacia los datos contenidos en la tabla de salida, y son estos datos los que contienen la amplitud de correspondería al seno (o coseno) del ángulo equivalente al número contenido en el acumulador de fase. Como los valores típicos de N van desde los 32 hasta 48 bits, si asociáramos a cada valor posible en el acumulador de fase una determinada amplitud, ¡ocuparíamos excesiva memoria!, por lo cual en la práctica se consideran sólo los P bits más significativos (usualmente 14 bits en DDS comerciales).
El valor de TW no necesariamente será un divisor exacto de 2^N, por lo cual al completar un ciclo (giro completo del fasor mostrado en la figura 2) podría no empezar en valor 0 el siguiente ciclo, sino en una fracción de TW. En esencia, cuando con la siguiente adición de TW al acumulador de fase sobrepasa la capacidad numérica de este, simplemente se ignora el bit de acarreo (overflow en inglés) y el ciclo se inicia nuevamente desde un valor numérico correspondiente a la fracción de TW que se puede expresar en N bits, contenida en el acumulador de fase.
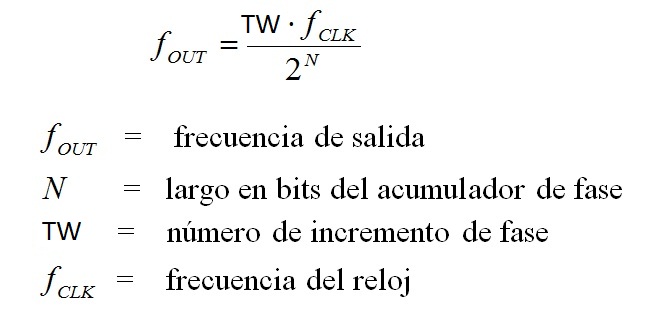
Según sea el valor contenido en el acumulador de fase, en cada ciclo de reloj se envía al conversor digital – analógico el valor correspondiente de la tabla de salida, obteniendo a la salida de este una sinusoide cuya frecuencia es función de TW (valor que controlamos externamente), la frecuencia de reloj (fija, definida por el hardware) y N (capacidad del acumulador de fase, también definido por el hardware). La ecuación que determina la frecuencia de salida es la siguiente:
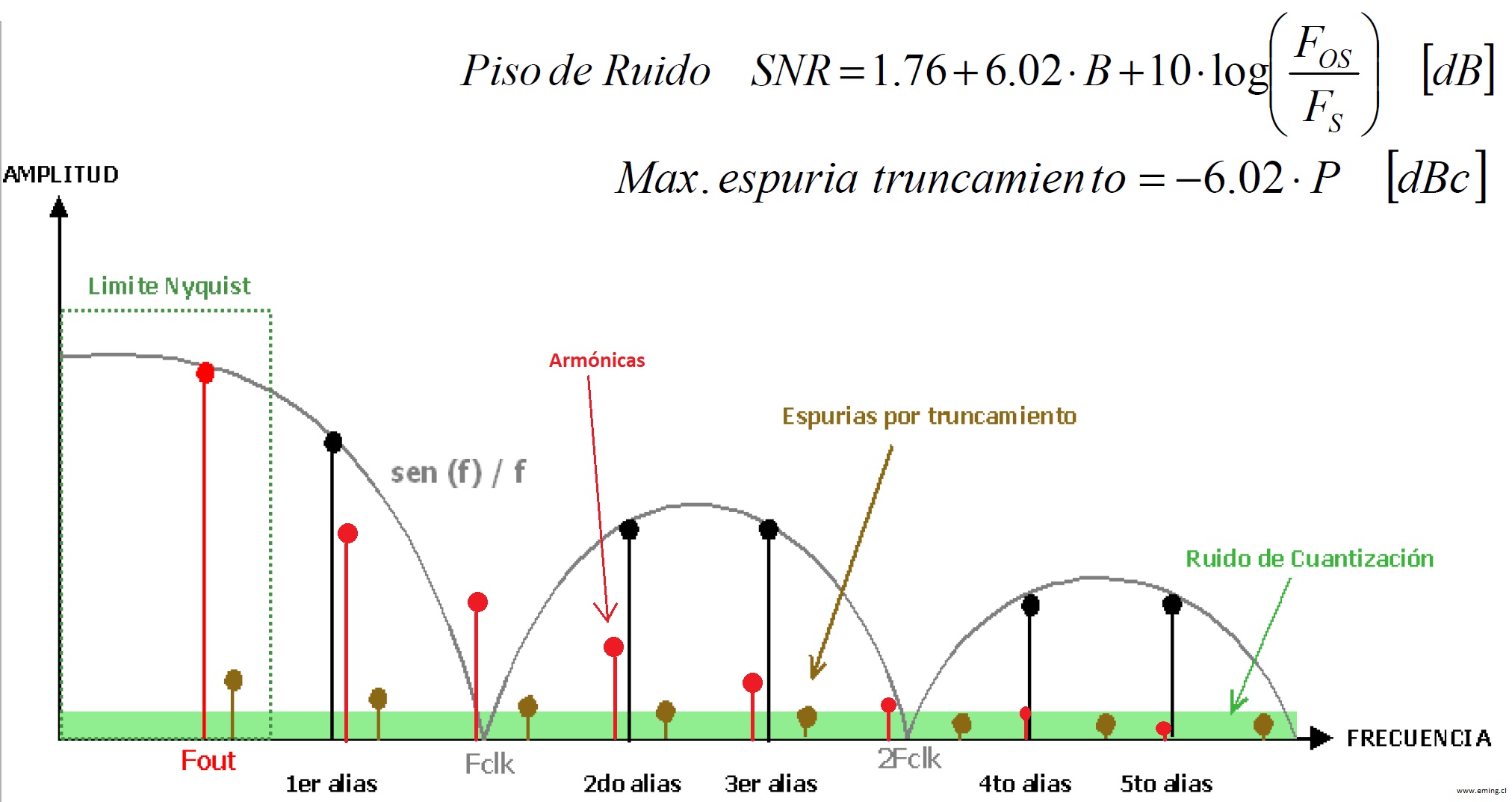
Ecuación 1. Definición de la frecuencia sintetizada en un DDS. Frecuencia máxima utilizable está definida por el límite de Nyquist. Sin embargo, en la práctica, se puede considerar un valor razonable el 30% de la frecuencia del reloj.
Notar que para obtener frecuencias múltiplos exactos de 1 Hz, es necesario que la frecuencia de reloj sea una potencia de 2 – suponiendo exacta la frecuencia de reloj -. Sin embargo, para DDS con un acumulador de fase de 32 bits o más, la cantidad de frecuencias posibles es tan elevada que la resolución en frecuencia es muy fina (paso entre frecuencias posibles a generar por el DDS es de orden de fracción de Hz), con lo cual aunque utilicemos relojes de frecuencias comunes (125 MHz, por ejemplo) podemos aproximarnos a la frecuencia que se desea generar con error inferior a 1 Hz, más que suficiente para cualquier aplicación práctica.
Consideraciones respecto del espectro de salida de un DDS
En la figura 3 tenemos un dibujo simplificado donde aparecen las principales componentes espurias que se generan en un DDS.
Figura 3. Dibujo simplificado donde podemos ver las principales frecuencias espurias generadas por el DDS en operación estática. Piso de ruido dado por el error de cuantización, componentes por aliasing, frecuencias armónicas y espurias por truncamiento del número de fase.
A continuación una breve descripción de cada una de ellas:
Frecuencias alias por digitalización de la señal. Por efecto alias, se observan componentes cuyas frecuencias están dadas por las sumas y restas de múltiplos de la frecuencia de muestreo (reloj fclk) y la fundamental (frecuencia de salida fout). El principal objetivo del filtro implementado en el módulo AD9850 es filtrar estas frecuencias imágenes.
Ruido de cuantización.El proceso de conversión digital a analógica, donde se obtiene un voltaje sinusoide, al tratarse de una señal digital tenemos que existe una diferencia entre el valor entregado por el conversor y aquel que debería tener la sinusoide. Este error de cuantización está determinado por la resolución del conversor D/A (típicamente entre 10 y 14 bits para DDS comerciales). Es razonable pensar que la potencia de ruido generada por este error de cuantización se distribuye uniformemente en toda la banda definida por el límite de Nyquist (es decir, desde 0 Hz hasta la mitad de la frecuencia de reloj Fclk/2), por lo cual es posible reducir el piso de ruido si se incrementa la frecuencia de reloj. En la figura 3 se representa el piso de ruido y la relación señal a ruido determinada por el error de cuantización, suponiendo un conversor D/A de B bits y Fs = 2*fout, donde Fos es la frecuencia de sobremuestreo (Fos > Fs), es decir, frecuencia a la cual se puede incrementar el reloj del DDS. En la práctica, por ejemplo, si Fs = fclk = 80MHz, teóricamente el valor máximo de la frecuencia de salida es fout = 40MHz (definido por límite de Nyquist), pero podemos mejorar la SNR teórica que define la resolución del conversor D/A a través del uso de una frecuencia de reloj más elevada, por ejemplo, fclk = 125MHz, pues distribuiremos la potencia de ruido de cuantización en un rango mayor de frecuencias (desde 0Hz hasta 62.5MHz). Otra forma de verlo es que, para una frecuencia de reloj fclk dada, la SNR definida por el ruido de cuantización será mayor cuando la frecuencia sintetizada fout sea mucho menor que el límite de Nyquist (fclk/2). Por ello, nos convendrá utilizar DDS con frecuencia de reloj elevada, aunque las frecuencias que queramos sintetizar sean mucho menores que la mitad de la frecuencia de reloj.
Espurias por truncamiento del número de fase. Como indiqué en un párrafo anterior, por motivos prácticos la tabla de salida del NCO no puede contener tantos registros como valores posibles tenga el acumulador de fase (piensen que para un acumulador de N = 32 bits necesitamos varios GB, y para N = 48 bits son centenares de TB!), y por esto existe un error en la conversión entre el ángulo de salida de la sinusoide (que considera sólo los P bits más significativos) y el ángulo contenido en el acumulador de fase. Este error tiene periodicidades, las que definen frecuencias espurias. En términos prácticos, aquella componente espuria de mayor amplitud estará a -6.02P dB de la frecuencia fundamental (fout), con típicamente P = 14 bits, y el número de incremento de fase equivalente de la mayor espuria por esta causa estará dado por el máximo común divisor entre el número de incremento de fase TW y 2^(N-P-1). Si el número de incremento de fase satisface que el máximo común divisor entre TW y 2^(A-P) es 2^(A-P), entonces no hay espurias por truncamiento de fase, ya que el error de ángulo sería constante en todo el ciclo (no hay periodicidad, por lo tanto no hay frecuencias asociadas).
No linealidades del conversor digital – análogo.Es imposible construir un conversor ideal, por lo que siempre – al igual que en los amplificadores – existirán componentes armónicas de la fundamental causadas por no linealidades en el proceso de conversión. En ciertas oportunidades pueden ser beneficiosas, pues las frecuencias armónicas son múltiplos de la frecuencia de salida, las que pueden ser utilizadas por la electrónica. Un buen ejemplo de aquello es la Application Note AN-543, donde se utilizan las componentes armónicas provenientes de un AD9850 (con frecuencia de reloj de 125 MHz, por lo tanto, con una frecuencia de salida teórica máxima de 62.5 MHz -límite de Nyquist-) para implementar un transmisor para radiodifusión sonora modulado digitalmente (que opera entre 88 y 108 MHz).
Jitter.A variaciones instantáneas de la frecuencia se le denomina «jitter», y en un DDS puede ser causado por el jitter propio del generador de reloj (por ello es importante utilizar aquellos que sean muy estables), por circuitos PLL de reloj (típicamente los DDS con frecuencias de reloj muy elevadas suelen utilizar circuitos PLL para multiplicar la frecuencia de reloj de entrada, generando jitter y ruido de fase). También se puede ocasionar por acoplamiento entre las pistas del circuito de reloj y fuentes externas de RF, o bien por ruido térmico.
En fin… como todo circuito electrónico, especialmente si conjuga señales analógicas y digitales, tenemos diversas causas que pueden generar componentes espurias. Lo ideal es asegurarse de construir un hardware debidamente protegido de las EMI, y tener una señal de salida que aproveche toda la escala del conversor D/A con una frecuencia muy inferior al límite de Nyquist (fclk/2).
Ahora vamos a encender el cautín… construyamos nuestro propio oscilador local con un sintetizador digital directo, basado en AD9850 de Analog Devices.
Este proyecto está basado en el módulo DDS AD9850 con reloj de 125 MHz, disponible por Ebay y Amazon. Puedes trabajar con instrumentos básicos (multímetro), una radio MF/HF y/o un SDR (como el famoso RTL) para «escuchar» las frecuencias que sintetizas. Aquí muestro mediciones con instrumentos debidamente calibrados (excepto el frecuencímetro del osciloscopio… no le crean… lee bien hasta 3 MHz… el analizador de espectro es mucho más confiable) con el objetivo que puedas visualizar los resultados que obtendrás.
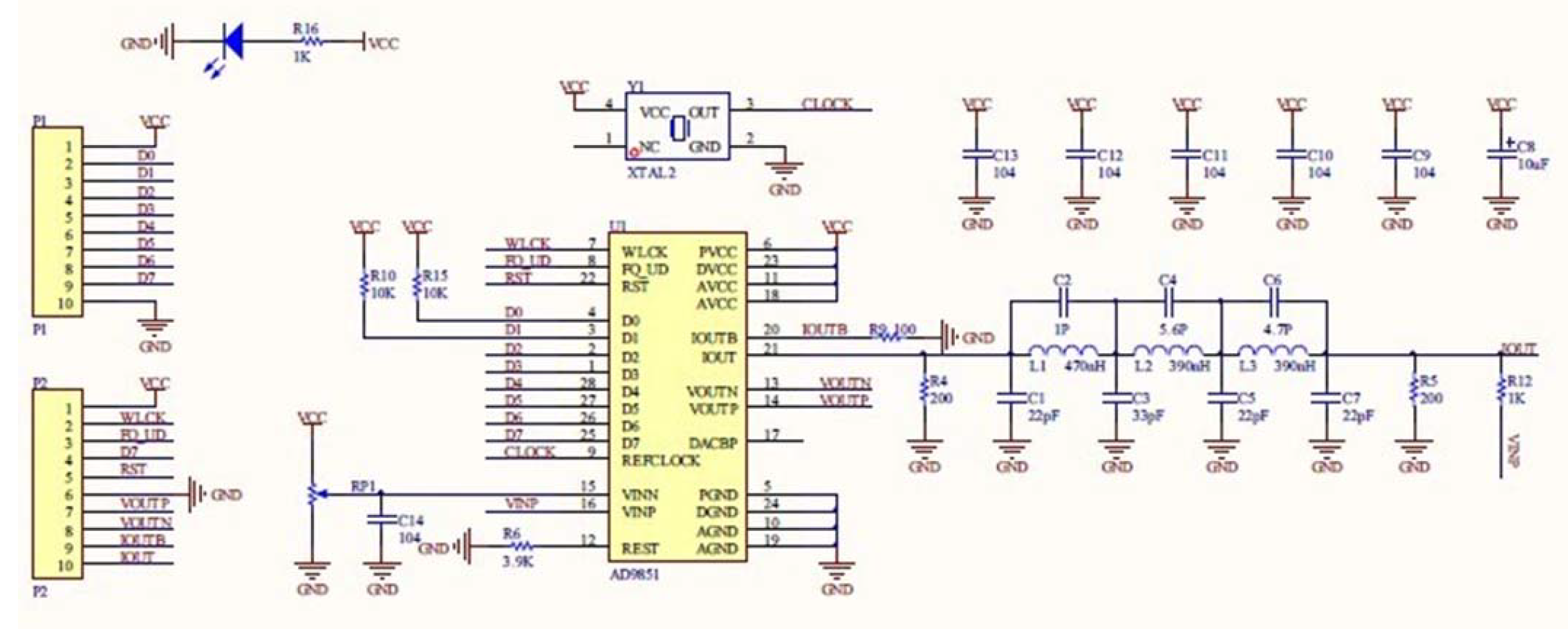
Bueno… vamos al circuito:
Figura 4. Esquemático con circuito para implementar oscilador local basado en el módulo DDS AD9850 @ 125MHz. Utiliza un microcontrolador PIC16F877A con un cristal de 4MHz y display LCD de 16×2 caracteres.
La tarjeta basada en PIC tiene muchos años… está reciclada de un proyecto que desarrollé en tiempos remotos. Si bien los microcontroladores PIC de la serie 16 son bastante «vintage» a estas alturas del partido, de vez en cuando los utilizo porque son muy confiables. Unos colegas me contaron que incluso algunos CubeSat que andan orbitando por la ionósfera tienen microcontroladores PIC en su interior 🙂 – aunque series más modernas -.
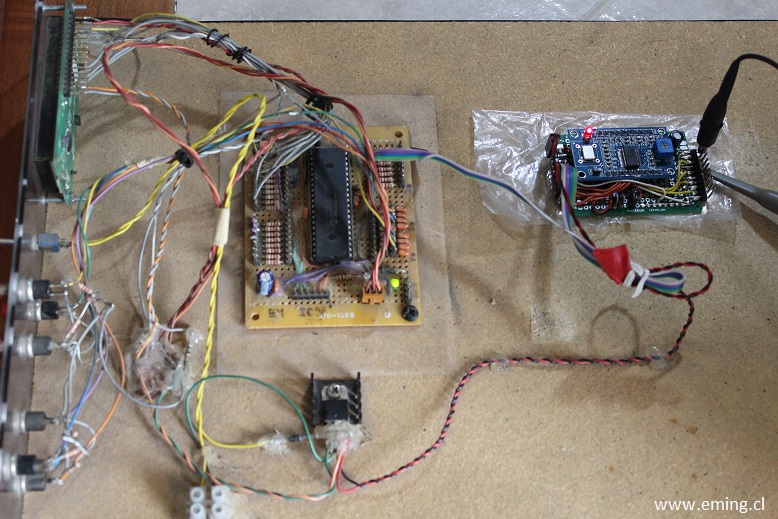
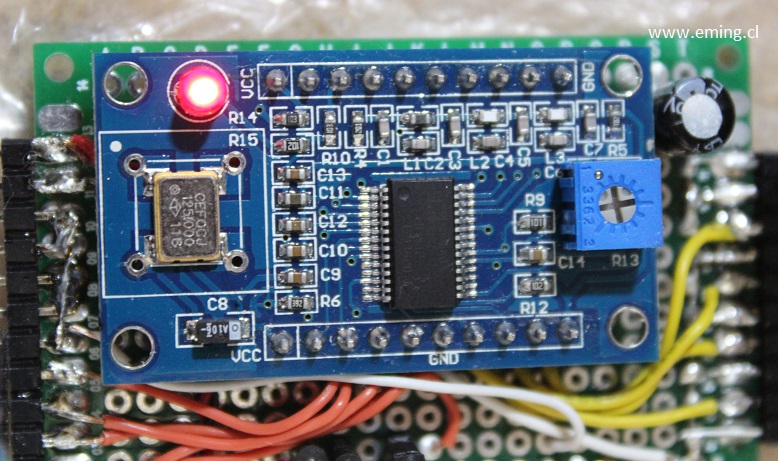
Figura 5. Módulo DDS con AD9850 y reloj de 125 MHz. Fuente: EIModule.Figura 6. Pines del módulo AD9850. Fuente: EIModule. Los pines D0 y D1 deben conectarse a +5VDC, mientras que RESET, D2, D3, D4, D5 y D6 a GND. D7 se usará como pin DATA (es el mismo pin que se indica como DATA). Los pines que van al microcontrolador son W_CLK, FQ_UD y DATA, además de +5VDC y GND que son comunes. Las salidas son SINE OUTPUT (1 con filtro anti-alias, 2 sin filtro) y SQUARE OUTPUT (1 y 2, complementarias).Foto 2. Podemos ver el módulo DDS AD9850 con su reloj de 125MHz, tarjeta con el PIC16F877A, regulador lineal 7805 (con disipador térmico), panel frontal con LCD 16×2, switch de encendido y botones de control.Foto 3. Módulo AD9850. El potenciómetro permite el ajuste del voltaje de referencia que ocupa el comparador para generar señales cuadradas de 5Vpp, comparando esta referencia con la salida sinusoidal. Moviendo ese potenciómetro, puedes ajustar el ciclo de trabajo de esta señal, muy útil para excitar, por ejemplo, un amplificador de RF clase E.
Y luego de mucho ensayo – error en la programación del PIC, tenemos los resultados que se muestran a continuación:
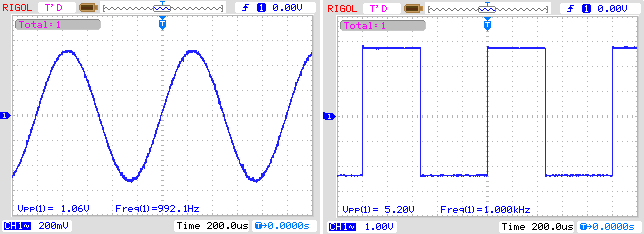
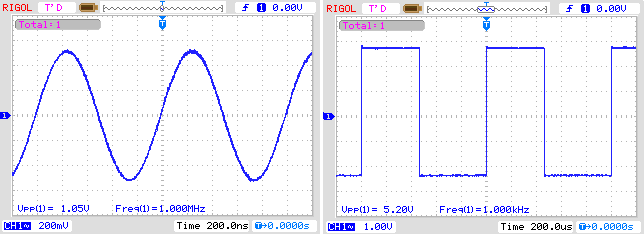
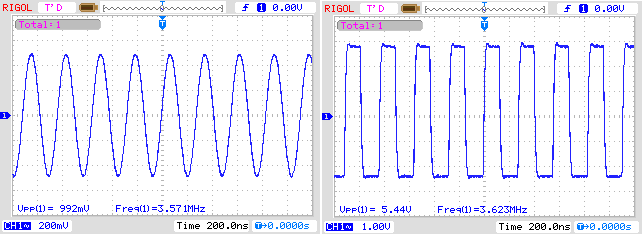
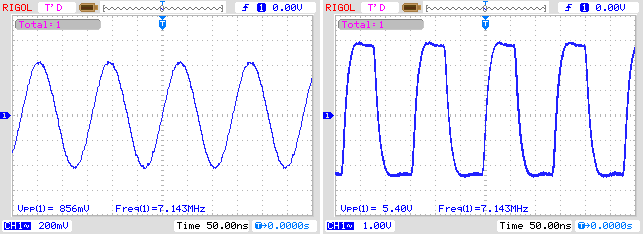
Formas de onda:
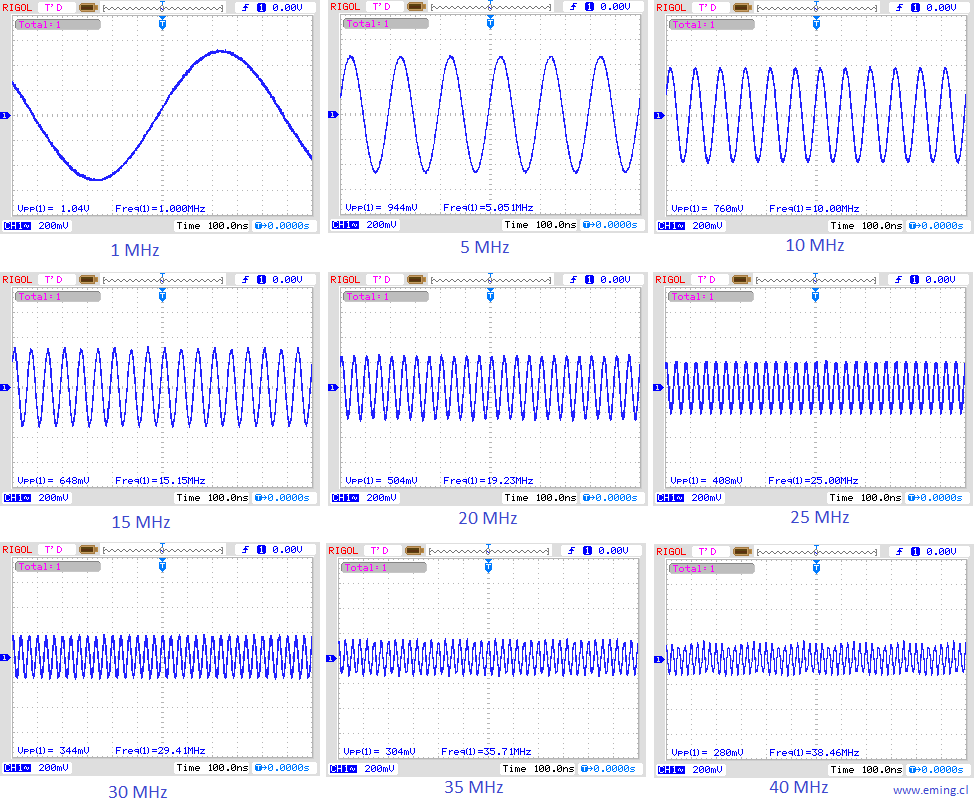
Figura 7. Formas de onda Fo = 1 kHzFigura 8. Formas de onda a Fo = 1 MHz, onda media. La onda cuadrada está perfecta para excitar un amplificador clase E para radiodifusión sonora en amplitud modulada.Figura 9. Formas de onda a Fo = 3.6 MHz, banda de 80 metros. Nótese la alta calidad del comparador. Insisto….. es perfecto para implementar transmisores con etapas clase E.Figura 10. Formas de onda a Fo = 7.15 MHz, banda de 40 metros.Figura 11. Forma de onda para diferentes frecuencias generadas por DDS, manteniendo escala de tiempo y amplitud constantes en todas las mediciones. Nótese como se reduce la amplitud a medida que se incrementa la frecuencia.
Espectro de salida:
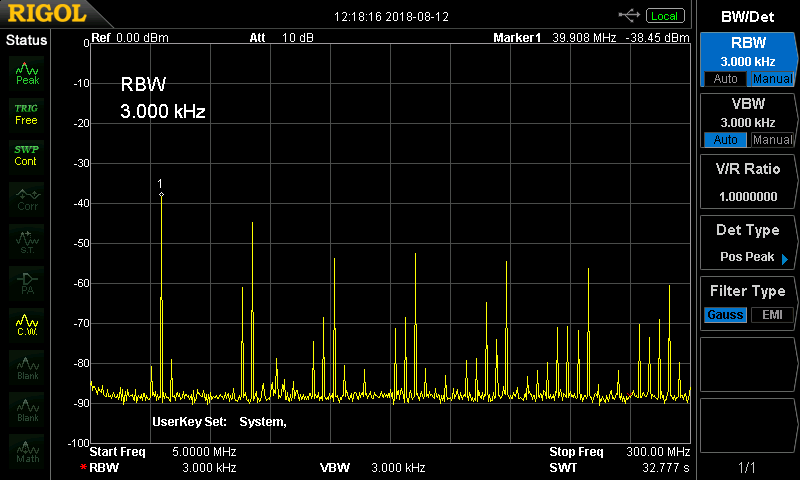
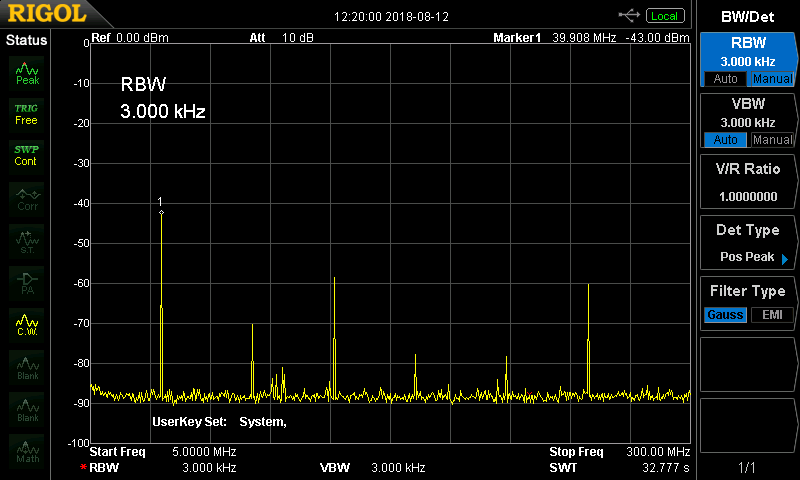
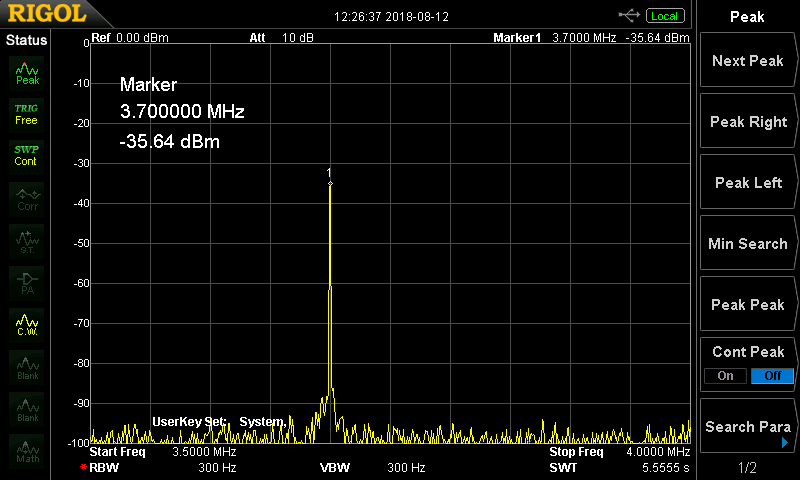
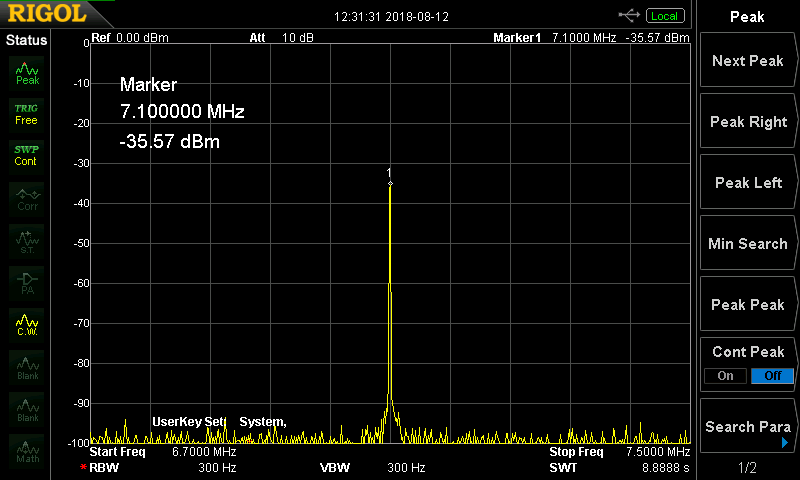
Figura 12. Espectro de salida con Fo = 40 MHz y sin filtro. Aquí podemos ver claramente frecuencias alias y también armónicas.Figura 13. Espectro de salida a Fo = 40 MHz y con filtro. Observamos una importante reducción en las componentes espurias, especialmente en frecuencias generadas por efecto alias. Es poco efectivo filtrando componentes armónicas.Figura 14. Espectro a 1 MHz. Contrario a lo que esperaba, a baja frecuencia (es sólo 1 MHz) tenemos bastantes espurias, algunas de las cuales están por sobre los -40 dBc. Supongo se debe a ruidos externos provenientes, por ejemplo, de conmutaciones digitales de aparatos del entorno o el microcontrolador, o de las potentes emisoras broadcast que hay cerca de mi casa. Es algo que voy a investigar con calma. Sin embargo, a esta frecuencia el DDS sigue siendo una excelente opción para amplificadores conmutados, como los utilizados en transmisores de alta eficiencia para radiodifusión en AM. El analizador de espectro se configuró para que marcara la frecuencia donde estuviera la intensidad peak… nótese la altísima precisión del generador DDS. ACTUALIZACIÓN: Las espurias no identificadas corresponden a portadoras de radioemisoras AM.Figura 15. Espectro a 3.7 MHz. Espectro bastante limpio, por lo cual este oscilador es adecuado para utilizarse en equipos con receptores heterodinos y amplificadores lineales. Ejemplo con fundamental en la banda de 80 metros.Figura 16. Espectro a 7.1 MHz. Al igual que en la figura anterior, espectro bastante limpio, por lo cual este oscilador es adecuado para utilizarse en equipos con receptores heterodinos y amplificadores lineales. Ejemplo con fundamental en la banda de 40 metros.
Mi intención es probar este sintetizador como oscilador local para un transceptor SSB en kit que tengo ensamblado, pero actualmente en formato OFV con polivaricon. Es el Iler 40. Una maravilla que necesita de un buen OFV.
Comportamiento energético y térmico…
Luego de pruebas en diferentes frecuencias, noté que cuando generaba un fout mayor a 20MHz, el DDS se calentaba a temperatura sensible al tacto. Por ello, luego de dejar apagado el dispositivo unos minutos hasta que alcanzara temperatura ambiente, lo encendí con fout = 40MHz y, al minuto de operación y temperatura ambiente de 18°C, el AD9850 alcanzó una temperatura de 41.28°C. Por ello, estimo recomendable utilizar disipador térmico. Me parece buena opción ocupar estos que hay que el comercio para los chips del Raspberry Pi (esos que tienen un autoadhesivo para pegarse al chip).
Foto 4. Imagen térmica donde se aprecia el chip DDS a 41°C.
Como observamos en la figura 11, a medida que incrementamos la frecuencia de salida, tenemos que la amplitud de la señal va disminuyendo. Algo diferente ocurre con el consumo de corriente. El circuito completo, es decir, DDS + reloj+ microcontrolador + display, operando a 1kHz consume 170mA aprox., a 1MHz se eleva a 190mA, y a 40MHz llegamos a los 210mA. Como no tenemos un incremento en la potencia de salida del DDS (de hecho, es al revés), no nos queda otra opción que la potencia adicional que consume el DDS se debe estar disipando en forma de calor. Por ello, me parece muy necesario poner aunque sea un pequeño disipador, sobre todo si la temperatura ambiente de donde se utiliza este oscilador es alta… y vamos que con el calentamiento global quizás a qué extremo vamos a llegar.
Algunas aplicaciones de esta tecnología pueden ser:
Generadores de señal con modulaciones complejas, especialmente en DDS que permiten incorporar información en la amplitud. Un buen ejercicio sería implementar hardware donde se conecte un DDS con sus pines de programación paralela a una FPGA, de modo que podamos implementar circuitos de refresco de frecuencia, fase y amplitud de alta velocidad. Un circuito como este servirá para muchas cosas. ¡interesante futuro proyecto!.
Oscilador local en transmisores y/o receptores de radio. Ideal para equipos de banda lateral única (SSB).
Sintetizadores de audiofrecuencia de alta precisión.
Instrumentos de medición, como analizadores de espectro y analizadores de antenas.
Receptores de alta precisión para radioastronomía. Gracias a la gran cantidad de canales posibles, son una buena alternativa para construir receptores heterodinos que permitan hacer análisis de corrimientos de frecuencia por efecto Doppler para velocidades relativamente bajas. Con buenos filtros de frecuencia intermedia, podemos observar desplazamientos muy pequeños, del orden de los Hz.
¿Quieres construir tu oscilador local con DDS AD9850?:
Así quedó mi primer prototipo. En los links de descarga puedes encontrar la información necesaria para replicarlo.
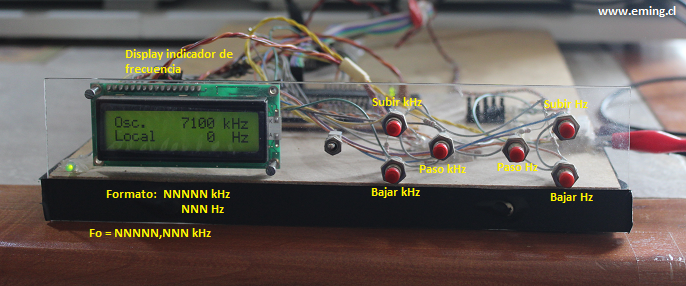
Foto 5. Panel frontal de mi prototipo de sintetizador DDS con AD9850. Si quieres construirlo, te sugiero seguir esta misma distribución de display y botones. Queda muy cómodo para manipular.
Para minimizar espurias en la señal de salida, recomiendo montar la electrónica en una caja metálica a tierra y protegerla de RF producida en etapas de potencia y/o aquellas con conmutaciones digitales de alta velocidad. No olvides poner disipador térmico al DDS!!.